

Soft Robotic Grippers for Biological Sampling on Deep Reefs
- PMID: 27625917
- PMCID: PMC4997628
- DOI: 10.1089/soro.2015.0019
Soft Robotic Grippers for Biological Sampling on Deep Reefs
Abstract
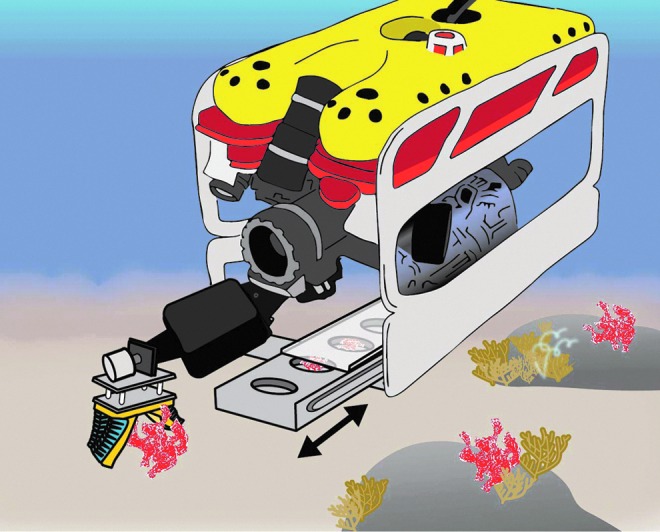
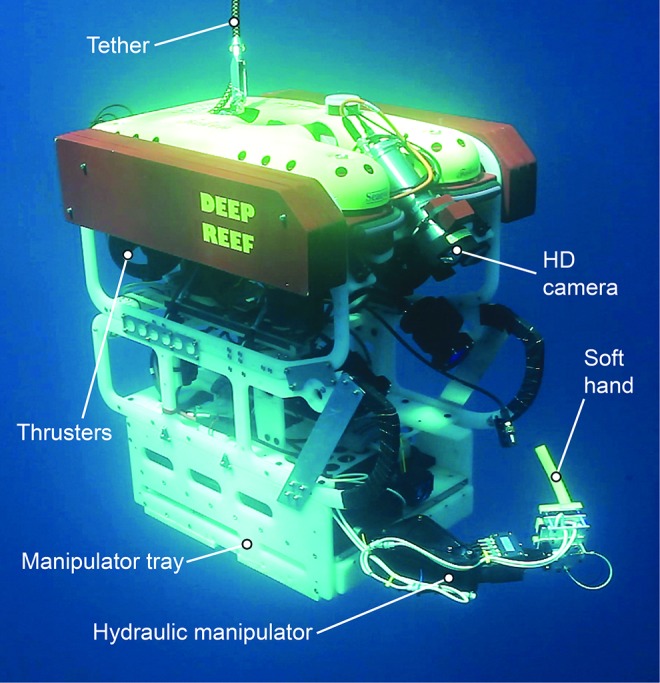
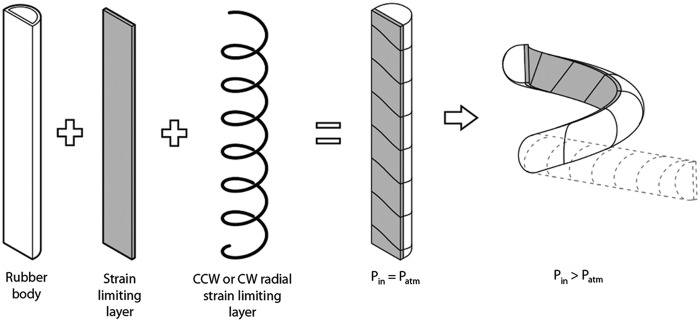
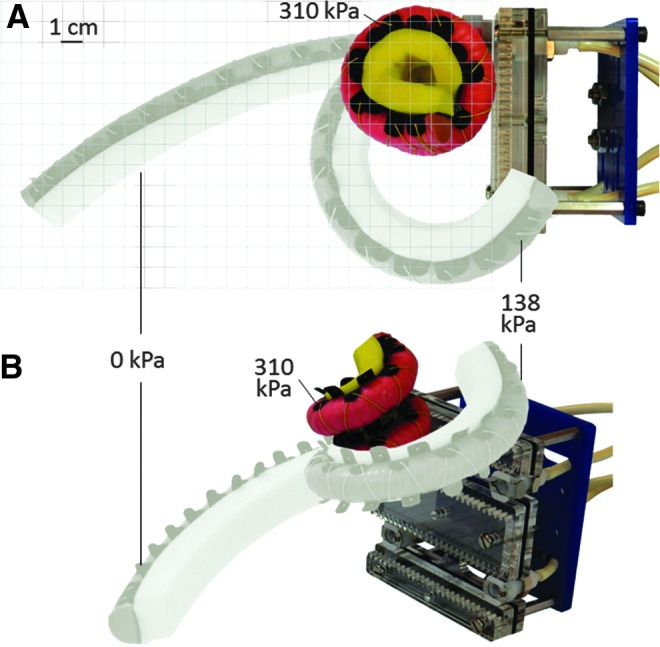
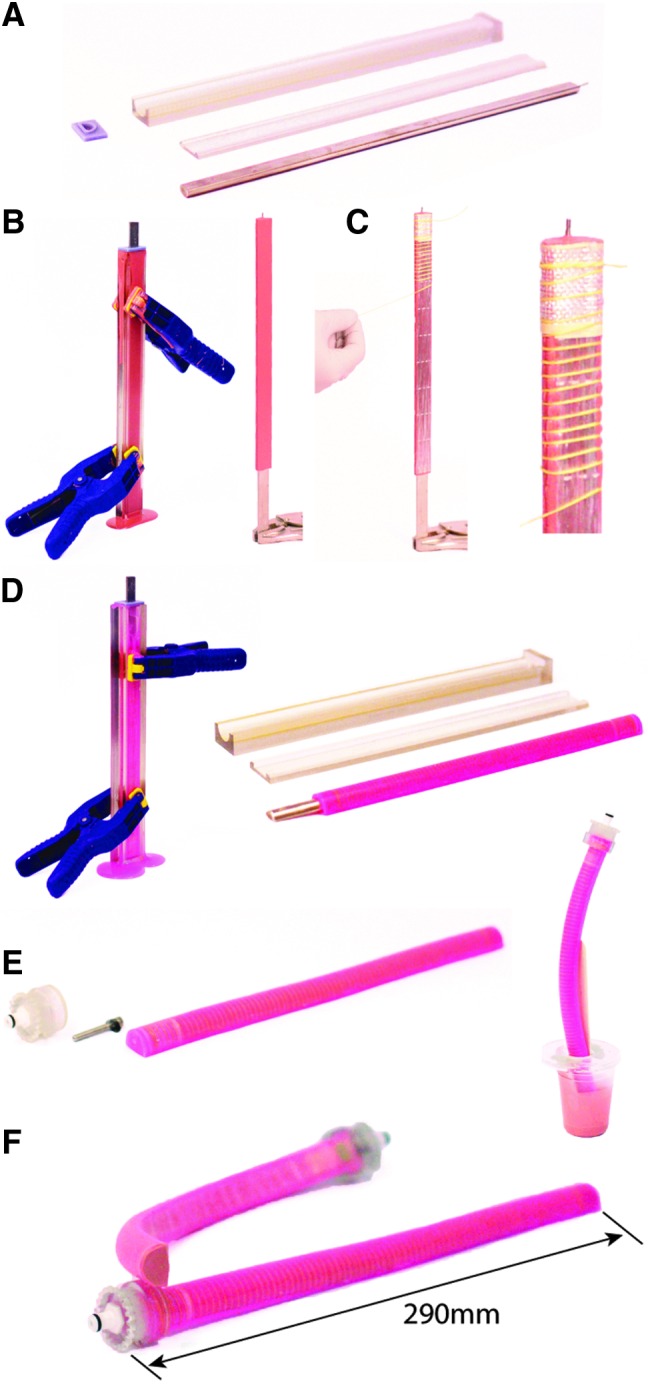
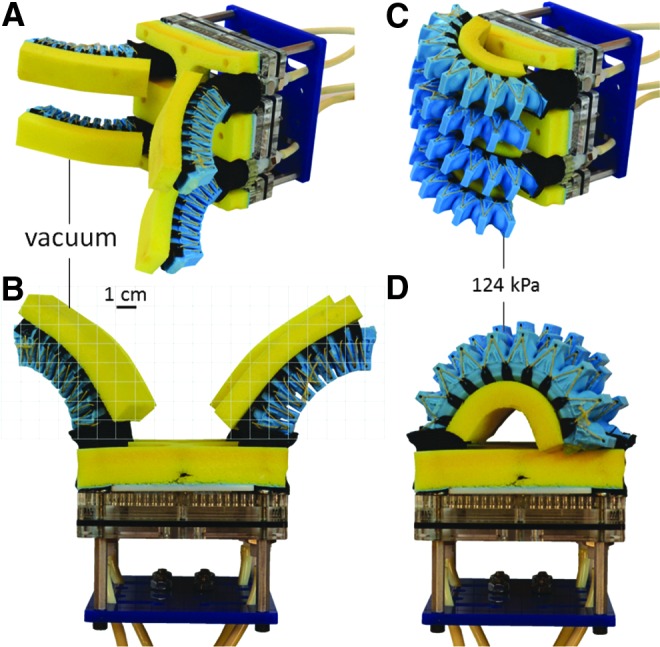
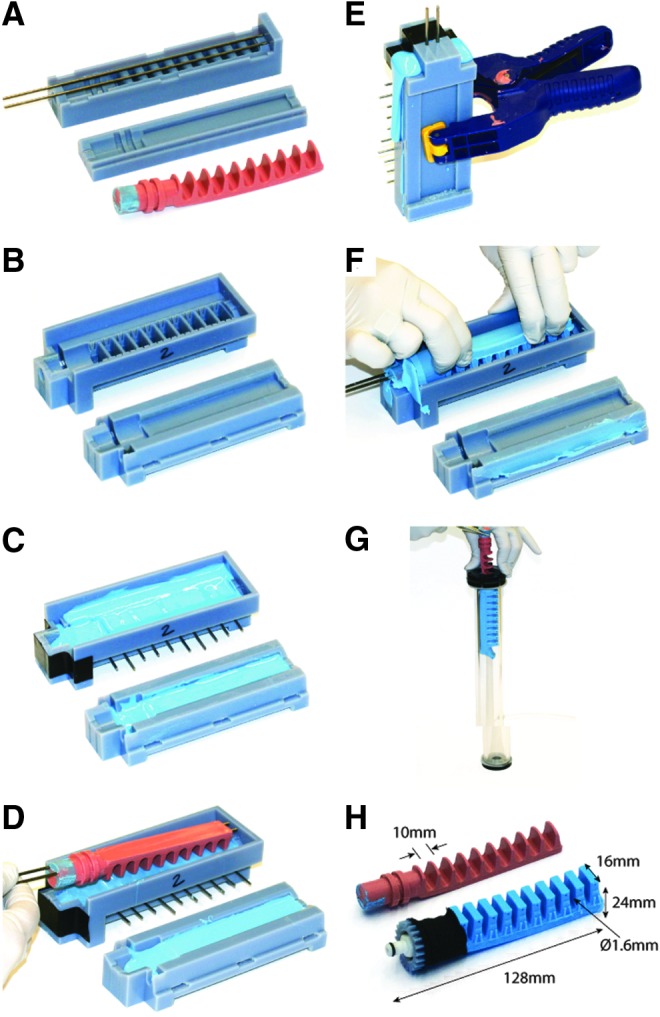
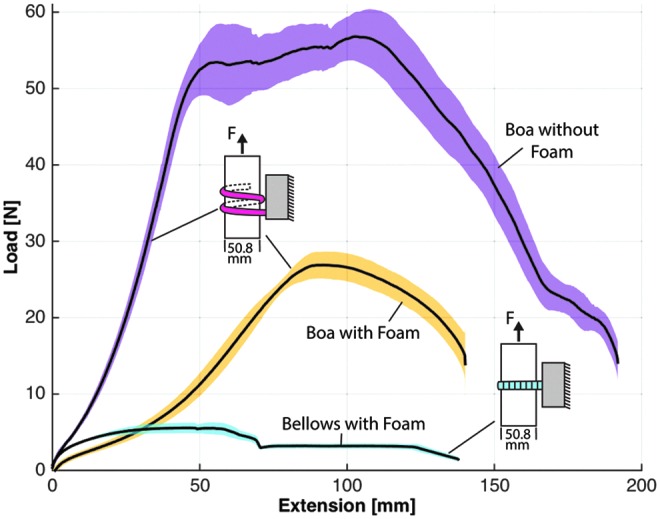
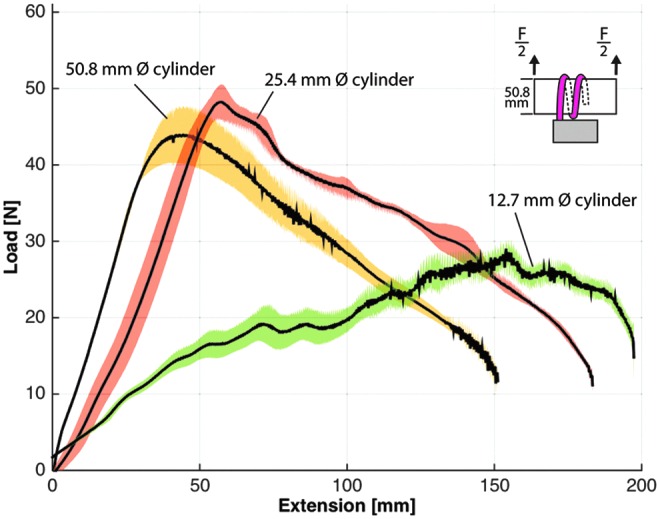
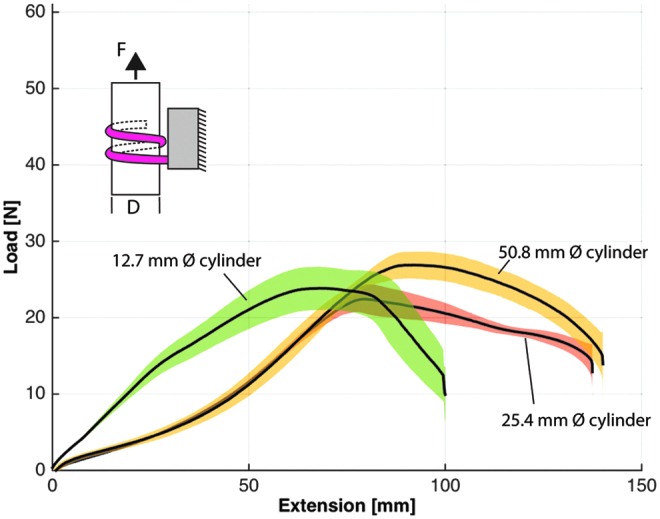
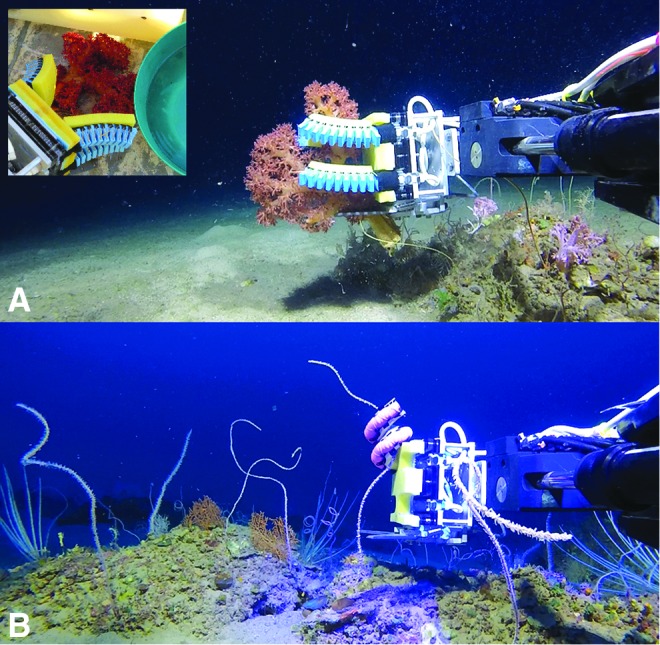
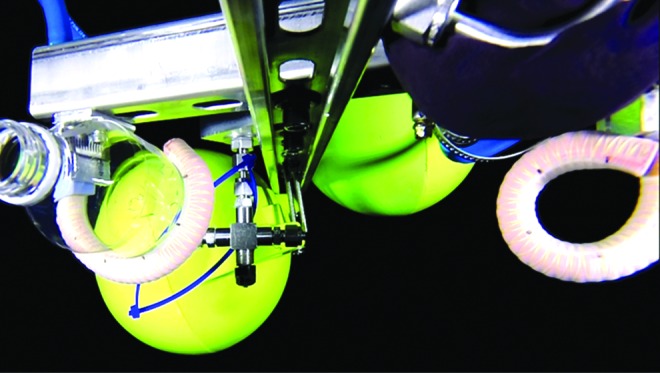
This article presents the development of an underwater gripper that utilizes soft robotics technology to delicately manipulate and sample fragile species on the deep reef. Existing solutions for deep sea robotic manipulation have historically been driven by the oil industry, resulting in destructive interactions with undersea life. Soft material robotics relies on compliant materials that are inherently impedance matched to natural environments and to soft or fragile organisms. We demonstrate design principles for soft robot end effectors, bench-top characterization of their grasping performance, and conclude by describing in situ testing at mesophotic depths. The result is the first use of soft robotics in the deep sea for the nondestructive sampling of benthic fauna.
Figures
References
-
- Darwin CR. The Structure and Distribution of Coral Reefs, 3rd ed. New York: Appleton and Co., 1889.
-
- Fricke H, Vareschi E, Oecologia DS. Photoecology of the coral Leptoseris fragilis in the Red Sea twilight zone (an experimental study by submersible). Oecologia 1987;733:371–381 - PubMed
-
- Sparks J, Gruber D. A new mesophotic clingfish (Teleostei: Gobiesocidae) from the bahamas. Copeia 2012;2:251–256
-
- Nir O, Gruber DF, Einbinder S, Kark S, Tchernov D. Changes in scleractinian coral Seriatopora hystrix morphology and its endocellular Symbiodinium characteristics along a bathymetric gradient from shallow to mesophotic reef. Coral Reefs 2011;30:1089–1100
-
- Roth MS, Padilla-Gamiño JL, Pochon X, Bidigare RR, Gates RD, Smith CM, et al. . Fluorescent proteins in dominant mesophotic reef-building corals. Mar Ecol Prog Ser 2015;521:63–79
LinkOut - more resources
Full Text Sources
Other Literature Sources