

Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
- PMID: 27670953
- PMCID: PMC5037455
- DOI: 10.1038/srep34224
Stretchable Materials for Robust Soft Actuators towards Assistive Wearable Devices
Abstract
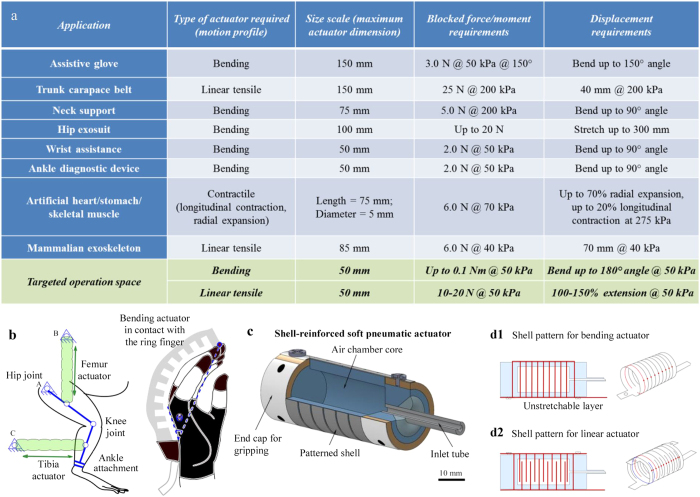
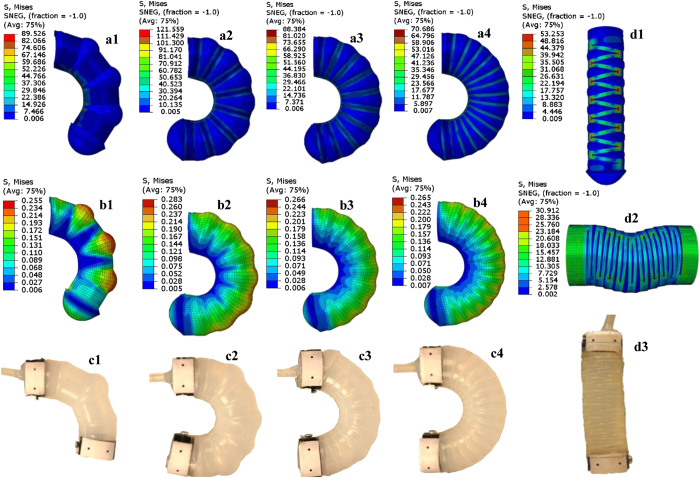
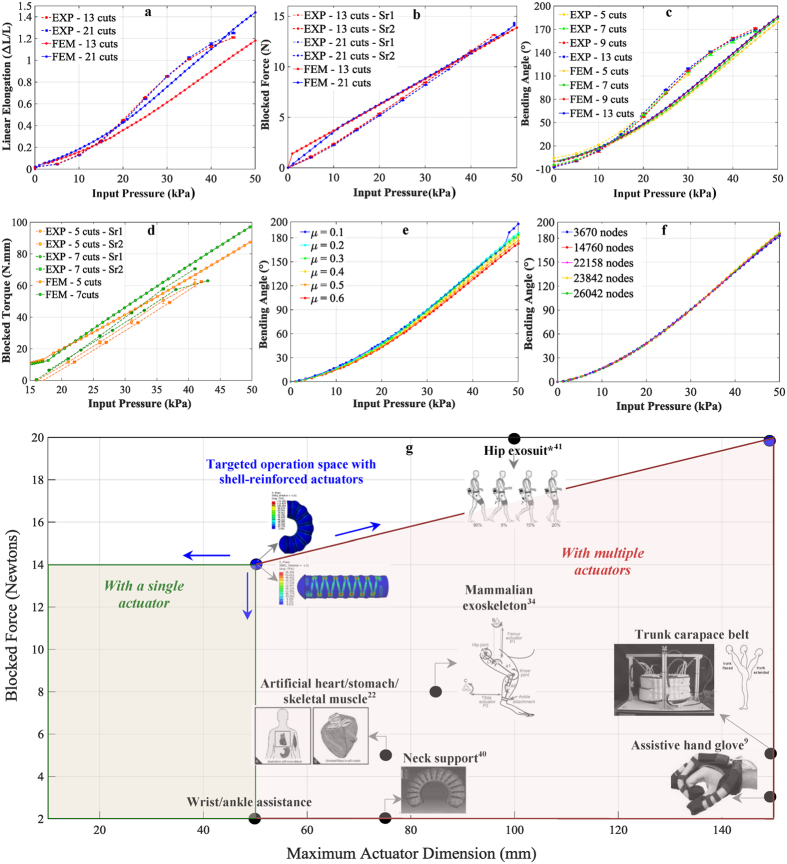
Soft actuators made from elastomeric active materials can find widespread potential implementation in a variety of applications ranging from assistive wearable technologies targeted at biomedical rehabilitation or assistance with activities of daily living, bioinspired and biomimetic systems, to gripping and manipulating fragile objects, and adaptable locomotion. In this manuscript, we propose a novel two-component soft actuator design and design tool that produces actuators targeted towards these applications with enhanced mechanical performance and manufacturability. Our numerical models developed using the finite element method can predict the actuator behavior at large mechanical strains to allow efficient design iterations for system optimization. Based on two distinctive actuator prototypes' (linear and bending actuators) experimental results that include free displacement and blocked-forces, we have validated the efficacy of the numerical models. The presented extensive investigation of mechanical performance for soft actuators with varying geometric parameters demonstrates the practical application of the design tool, and the robustness of the actuator hardware design, towards diverse soft robotic systems for a wide set of assistive wearable technologies, including replicating the motion of several parts of the human body.
Figures
References
-
- Ilievski F., Mazzeo A. D., Shepherd R. F., Chen X. & Whitesides G. M. Soft robotics for chemists. Angewandte Chemie 50, 1890–1895 (2011). - PubMed
-
- Martinez R. V., Fish C. R., Chen X. & Whitesides G. M. Elastomeric Origami: Programmable Paper-Elastomer Composites as Pneumatic Actuators. Advanced Functional Materials 22, 1376–1384 (2012).
-
- Tolley M. T. et al.. A Resilient, Untethered Soft Robot. Soft Robotics 1, 213–223 (2014).
-
- Lin H.-T., Leisk G. G. & Trimmer B. GoQBot: a caterpillar-inspired soft-bodied rolling robot. Bioinspiration & Biomimetics 6, 026007 (2011). - PubMed
LinkOut - more resources
Full Text Sources
Other Literature Sources
