

Making Sense of Real-World Scenes
- PMID: 27769727
- PMCID: PMC5125545
- DOI: 10.1016/j.tics.2016.09.003
Making Sense of Real-World Scenes
Abstract
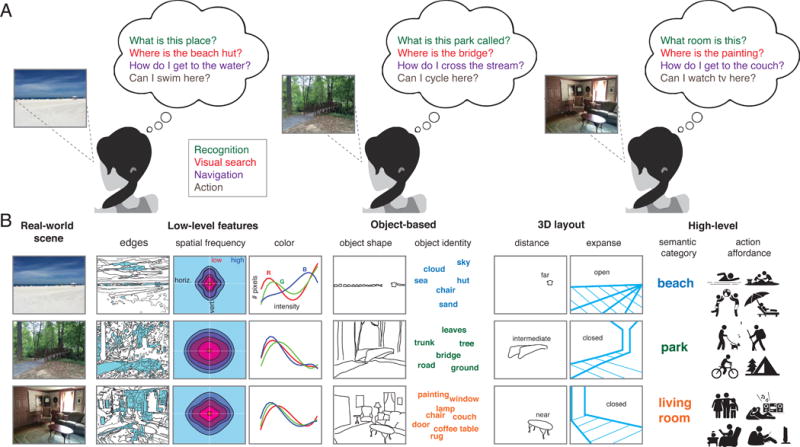
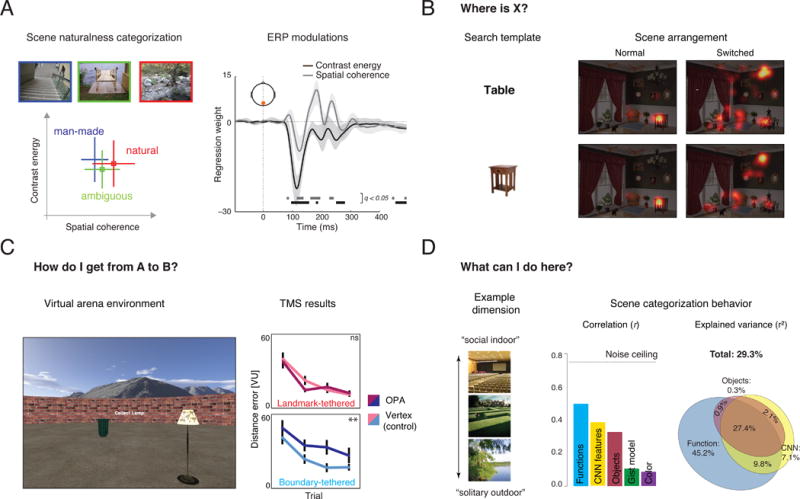
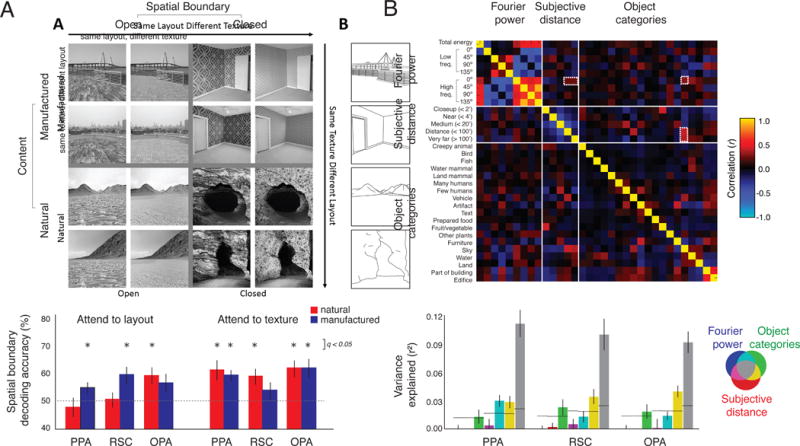
To interact with the world, we have to make sense of the continuous sensory input conveying information about our environment. A recent surge of studies has investigated the processes enabling scene understanding, using increasingly complex stimuli and sophisticated analyses to highlight the visual features and brain regions involved. However, there are two major challenges to producing a comprehensive framework for scene understanding. First, scene perception is highly dynamic, subserving multiple behavioral goals. Second, a multitude of different visual properties co-occur across scenes and may be correlated or independent. We synthesize the recent literature and argue that for a complete view of scene understanding, it is necessary to account for both differing observer goals and the contribution of diverse scene properties.
Copyright © 2016 Elsevier Ltd. All rights reserved.
Figures
References
-
- Torralba Antonio, Oliva A. Statistics of natural image categories. Netw Comput Neural Syst. 2003;14:391–412. - PubMed
-
- Greene MR, et al. What you see is what you expect: rapid scene understanding benefits from prior experience. Atten Percept Psychophys. 2015;77:1239–1251. - PubMed
-
- Tversky B, Hemenway K. Categories of environmental scenes. Cogn Psychol. 1983;15:121–149.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
