

Referent control and motor equivalence of reaching from standing
- PMID: 27784802
- PMCID: PMC5225951
- DOI: 10.1152/jn.00292.2016
Referent control and motor equivalence of reaching from standing
Abstract
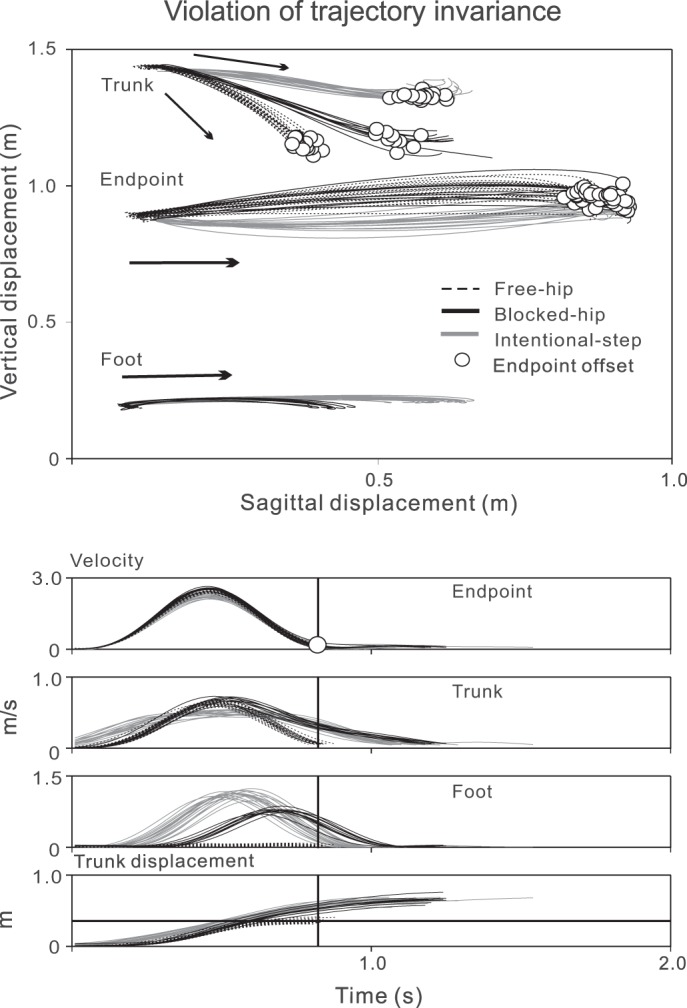
Motor actions may result from central changes in the referent body configuration, defined as the body posture at which muscles begin to be activated or deactivated. The actual body configuration deviates from the referent configuration, particularly because of body inertia and environmental forces. Within these constraints, the system tends to minimize the difference between these configurations. For pointing movement, this strategy can be expressed as the tendency to minimize the difference between the referent trajectory (RT) and actual trajectory (QT) of the effector (hand). This process may underlie motor equivalent behavior that maintains the pointing trajectory regardless of the number of body segments involved. We tested the hypothesis that the minimization process is used to produce pointing in standing subjects. With eyes closed, 10 subjects reached from a standing position to a remembered target located beyond arm length. In randomly chosen trials, hip flexion was unexpectedly prevented, forcing subjects to take a step during pointing to prevent falling. The task was repeated when subjects were instructed to intentionally take a step during pointing. In most cases, reaching accuracy and trajectory curvature were preserved due to adaptive condition-specific changes in interjoint coordination. Results suggest that referent control and the minimization process associated with it may underlie motor equivalence in pointing.
New & noteworthy: Motor actions may result from minimization of the deflection of the actual body configuration from the centrally specified referent body configuration, in the limits of neuromuscular and environmental constraints. The minimization process may maintain reaching trajectory and accuracy regardless of the number of body segments involved (motor equivalence), as confirmed in this study of reaching from standing in young healthy individuals. Results suggest that the referent control process may underlie motor equivalence in reaching.
Keywords: adaptation; arm movement; compensation; interjoint coordination; motor control; redundancy; synergy.
Copyright © 2017 the American Physiological Society.
Figures








Similar articles
-
Reduced Kinematic Redundancy and Motor Equivalence During Whole-Body Reaching in Individuals With Chronic Stroke.Neurorehabil Neural Repair. 2018 Feb;32(2):175-186. doi: 10.1177/1545968318760725. Neurorehabil Neural Repair. 2018. PMID: 29554848
-
Control of double-joint arm posture in adults with unilateral brain damage.Exp Brain Res. 2005 Jun;163(4):468-86. doi: 10.1007/s00221-004-2202-9. Epub 2005 Feb 3. Exp Brain Res. 2005. PMID: 15690154
-
Hand trajectory invariance in reaching movements involving the trunk.Exp Brain Res. 2001 Jun;138(3):288-303. doi: 10.1007/s002210100694. Exp Brain Res. 2001. PMID: 11460767
-
Threshold position control and the principle of minimal interaction in motor actions.Prog Brain Res. 2007;165:267-81. doi: 10.1016/S0079-6123(06)65017-6. Prog Brain Res. 2007. PMID: 17925252 Review.
-
Use of the uncontrolled manifold (UCM) approach to understand motor variability, motor equivalence, and self-motion.Adv Exp Med Biol. 2014;826:91-100. doi: 10.1007/978-1-4939-1338-1_7. Adv Exp Med Biol. 2014. PMID: 25330887 Review. No abstract available.
Cited by
-
Referent control of the orientation of posture and movement in the gravitational field.Exp Brain Res. 2018 Feb;236(2):381-398. doi: 10.1007/s00221-017-5133-y. Epub 2017 Nov 21. Exp Brain Res. 2018. PMID: 29164285
-
Referent control of anticipatory grip force during reaching in stroke: an experimental and modeling study.Exp Brain Res. 2019 Jul;237(7):1655-1672. doi: 10.1007/s00221-019-05498-y. Epub 2019 Apr 11. Exp Brain Res. 2019. PMID: 30976821
-
Mild Stroke Affects Pointing Movements Made in Different Frames of Reference.Neurorehabil Neural Repair. 2021 Mar;35(3):207-219. doi: 10.1177/1545968321989348. Epub 2021 Jan 29. Neurorehabil Neural Repair. 2021. PMID: 33514272 Free PMC article.
-
Vestibular and corticospinal control of human body orientation in the gravitational field.J Neurophysiol. 2018 Dec 1;120(6):3026-3041. doi: 10.1152/jn.00483.2018. Epub 2018 Sep 12. J Neurophysiol. 2018. PMID: 30207862 Free PMC article.
-
Carpal tunnel release surgery restores force control but not force coordination in CTS patients.Sci Rep. 2025 May 7;15(1):15866. doi: 10.1038/s41598-025-99250-y. Sci Rep. 2025. PMID: 40335576 Free PMC article.
References
-
- Adamovich SV, Archambault PS, Ghafouri M, Levin MF, Poizner H, Feldman AG. Hand trajectory invariance in reaching movements involving the trunk. Exp Brain Res 138: 288–303, 2001. - PubMed
-
- Archambault P, Pigeon P, Feldman AG, Levin MF. Recruitment and sequencing of different degrees of freedom during pointing movements involving the trunk in healthy and hemiparetic subjects. Exp Brain Res 126: 55–67, 1999. - PubMed
-
- Archambault PS, Mihaltchev P, Levin MF, Feldman AG. Basic elements of arm postural control analyzed by unloading. Exp Brain Res 164: 225–241, 2005. - PubMed
-
- Asatryan DG, Feldman AG. Functional tuning of the nervous system with control of movements or maintenance of a steady posture: I. Mechanographic analysis for the work of the joint on execution of a postural task. Biophysics 10: 925–935, 1965.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical