

A Comprehensive Automated 3D Approach for Building Extraction, Reconstruction, and Regularization from Airborne Laser Scanning Point Clouds
- PMID: 27873931
- PMCID: PMC3787447
- DOI: 10.3390/s8117323
A Comprehensive Automated 3D Approach for Building Extraction, Reconstruction, and Regularization from Airborne Laser Scanning Point Clouds
Abstract
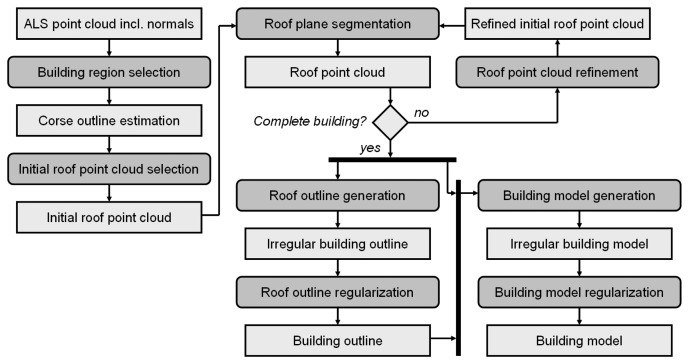
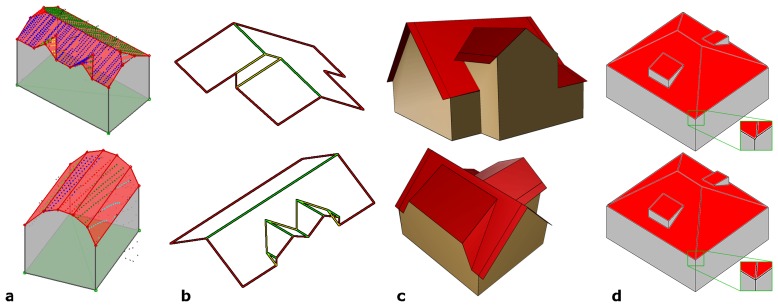
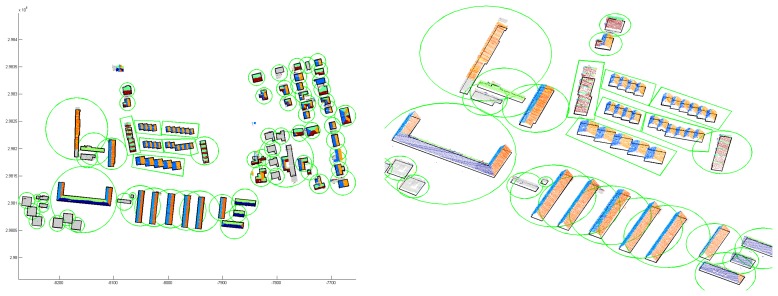
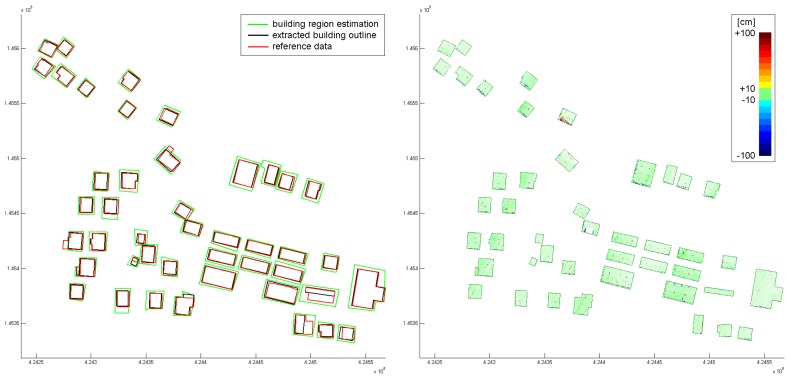
Three dimensional city models are necessary for supporting numerous management applications. For the determination of city models for visualization purposes, several standardized workflows do exist. They are either based on photogrammetry or on LiDAR or on a combination of both data acquisition techniques. However, the automated determination of reliable and highly accurate city models is still a challenging task, requiring a workflow comprising several processing steps. The most relevant are building detection, building outline generation, building modeling, and finally, building quality analysis. Commercial software tools for building modeling require, generally, a high degree of human interaction and most automated approaches described in literature stress the steps of such a workflow individually. In this article, we propose a comprehensive approach for automated determination of 3D city models from airborne acquired point cloud data. It is based on the assumption that individual buildings can be modeled properly by a composition of a set of planar faces. Hence, it is based on a reliable 3D segmentation algorithm, detecting planar faces in a point cloud. This segmentation is of crucial importance for the outline detection and for the modeling approach. We describe the theoretical background, the segmentation algorithm, the outline detection, and the modeling approach, and we present and discuss several actual projects.
Keywords: building modeling; building outline; planar faces; regularization; segmentation.
Figures

References
-
- Clode S., Rottensteiner F. Detection and vectorization of roads from lidar data. Photogramm. Eng. Remote Sens. 2007;73(5):517–536.
-
- Mandlburger G., Briese C. Using airborne laser scanning for improved hydraulic models. International Congress on Modeling and Simulation; Christchurch, New Zealand. 2007.
-
- Melzer T., Briese C. Extraction and modeling of power lines from als point clouds. Proceedings of 28th Workshop of the Austrian Association for Pattern Recognition (ÖAGM); Hagenberg, Austria. 2004. pp. 47–54.
-
- Shan J., Toth C. Topographic laser ranging and scanning: Principles and processing. CRC Press; London, UK: 2008.
LinkOut - more resources
Full Text Sources
Other Literature Sources
