Parallel Computational Protein Design
- PMID: 27914056
- PMCID: PMC5192564
- DOI: 10.1007/978-1-4939-6637-0_13
Parallel Computational Protein Design
Abstract
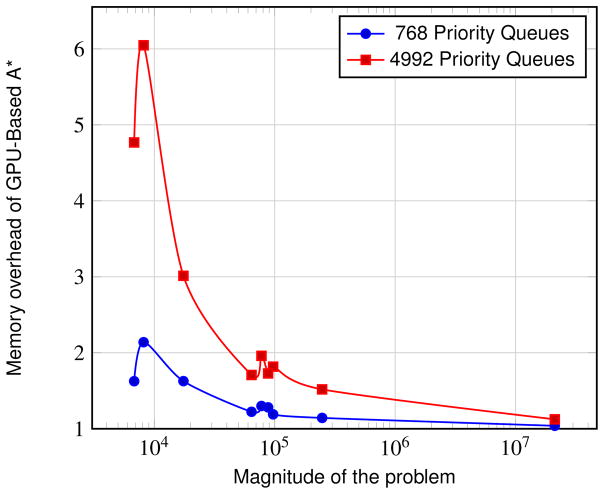
Computational structure-based protein design (CSPD) is an important problem in computational biology, which aims to design or improve a prescribed protein function based on a protein structure template. It provides a practical tool for real-world protein engineering applications. A popular CSPD method that guarantees to find the global minimum energy solution (GMEC) is to combine both dead-end elimination (DEE) and A* tree search algorithms. However, in this framework, the A* search algorithm can run in exponential time in the worst case, which may become the computation bottleneck of large-scale computational protein design process. To address this issue, we extend and add a new module to the OSPREY program that was previously developed in the Donald lab (Gainza et al., Methods Enzymol 523:87, 2013) to implement a GPU-based massively parallel A* algorithm for improving protein design pipeline. By exploiting the modern GPU computational framework and optimizing the computation of the heuristic function for A* search, our new program, called gOSPREY, can provide up to four orders of magnitude speedups in large protein design cases with a small memory overhead comparing to the traditional A* search algorithm implementation, while still guaranteeing the optimality. In addition, gOSPREY can be configured to run in a bounded-memory mode to tackle the problems in which the conformation space is too large and the global optimal solution cannot be computed previously. Furthermore, the GPU-based A* algorithm implemented in the gOSPREY program can be combined with the state-of-the-art rotamer pruning algorithms such as iMinDEE (Gainza et al., PLoS Comput Biol 8:e1002335, 2012) and DEEPer (Hallen et al., Proteins 81:18-39, 2013) to also consider continuous backbone and side-chain flexibility.
Keywords: A*; CUDA; Dead-end elimination; GPGPU; Parallel computing; Protein design.
Figures


Similar articles
-
An efficient parallel algorithm for accelerating computational protein design.Bioinformatics. 2014 Jun 15;30(12):i255-i263. doi: 10.1093/bioinformatics/btu264. Bioinformatics. 2014. PMID: 24931991 Free PMC article.
-
Protein design using continuous rotamers.PLoS Comput Biol. 2012 Jan;8(1):e1002335. doi: 10.1371/journal.pcbi.1002335. Epub 2012 Jan 12. PLoS Comput Biol. 2012. PMID: 22279426 Free PMC article.
-
Deterministic Search Methods for Computational Protein Design.Methods Mol Biol. 2017;1529:107-123. doi: 10.1007/978-1-4939-6637-0_4. Methods Mol Biol. 2017. PMID: 27914047
-
Computational protein design with backbone plasticity.Biochem Soc Trans. 2016 Oct 15;44(5):1523-1529. doi: 10.1042/BST20160155. Epub 2016 Oct 19. Biochem Soc Trans. 2016. PMID: 27911735 Free PMC article. Review.
-
The Framework of Computational Protein Design.Methods Mol Biol. 2017;1529:3-19. doi: 10.1007/978-1-4939-6637-0_1. Methods Mol Biol. 2017. PMID: 27914044 Review.
Cited by
-
Protein design accelerates the development and application of optogenetic tools.Comput Struct Biotechnol J. 2025 Feb 21;27:717-732. doi: 10.1016/j.csbj.2025.02.014. eCollection 2025. Comput Struct Biotechnol J. 2025. PMID: 40092664 Free PMC article. Review.
-
The RESP AI model accelerates the identification of tight-binding antibodies.Nat Commun. 2023 Jan 28;14(1):454. doi: 10.1038/s41467-023-36028-8. Nat Commun. 2023. PMID: 36709319 Free PMC article.
References
-
- Gorczynski MJ, Grembecka J, Zhou Y, Kong Y, Roudaia L, Douvas MG, Newman M, Bielnicka I, Baber G, Corpora T, et al. Allosteric inhibition of the protein-protein interaction between the leukemia-associated proteins Runx1 and CBF$\beta$ Chemistry & biology. 2007;14(10):1186–1197. - PubMed
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous