

Water striders adjust leg movement speed to optimize takeoff velocity for their morphology
- PMID: 27924805
- PMCID: PMC5150985
- DOI: 10.1038/ncomms13698
Water striders adjust leg movement speed to optimize takeoff velocity for their morphology
Abstract
Water striders are water-walking insects that can jump upwards from the water surface. Quick jumps allow striders to avoid sudden dangers such as predators' attacks, and therefore their jumping is expected to be shaped by natural selection for optimal performance. Related species with different morphological constraints could require different jumping mechanics to successfully avoid predation. Here we show that jumping striders tune their leg rotation speed to reach the maximum jumping speed that water surface allows. We find that the leg stroke speeds of water strider species with different leg morphologies correspond to mathematically calculated morphology-specific optima that maximize vertical takeoff velocity by fully exploiting the capillary force of water. These results improve the understanding of correlated evolution between morphology and leg movements in small jumping insects, and provide a theoretical basis to develop biomimetic technology in semi-aquatic environments.
Figures
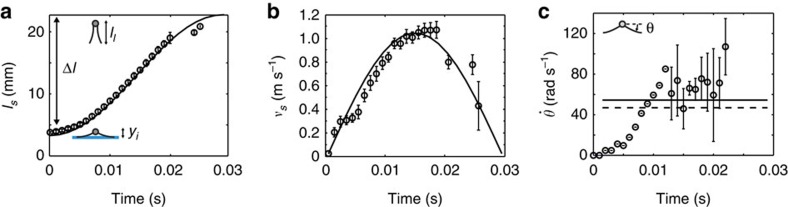
 ). The dashed line indicates the time average of the measured values of
). The dashed line indicates the time average of the measured values of  through the whole cycle and the solid line refers to the corresponding angular speed of leg rotation ω used in the model calculations of ls and νs in a,b.
through the whole cycle and the solid line refers to the corresponding angular speed of leg rotation ω used in the model calculations of ls and νs in a,b.
References
-
- Hu D. L., Chan B. & Bush J. W. M. The hydrodynamics of water strider locomotion. Nature 424, 663–666 (2003). - PubMed
-
- Gao X. F. & Jiang L. Water-repellent legs of water striders. Nature 432, 36–36 (2004). - PubMed
-
- Hu D. L. & Bush J. W. M. The hydrodynamics of water-walking arthropods. J. Fluid Mech. 644, 5–33 (2010).
-
- Gao P. & Feng J. J. A numerical investigation of the propulsion of water walkers. J. Fluid Mech. 668, 363–383 (2011).
-
- Suter R. et al.. Locomotion on the water surface: propulsive mechanisms of the fisher spider. J. Exp. Biol. 200, 2523–2538 (1997). - PubMed
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Other Literature Sources
