

Fundamental Principles of Tremor Propagation in the Upper Limb
- PMID: 27957608
- PMCID: PMC5541859
- DOI: 10.1007/s10439-016-1765-5
Fundamental Principles of Tremor Propagation in the Upper Limb
Abstract
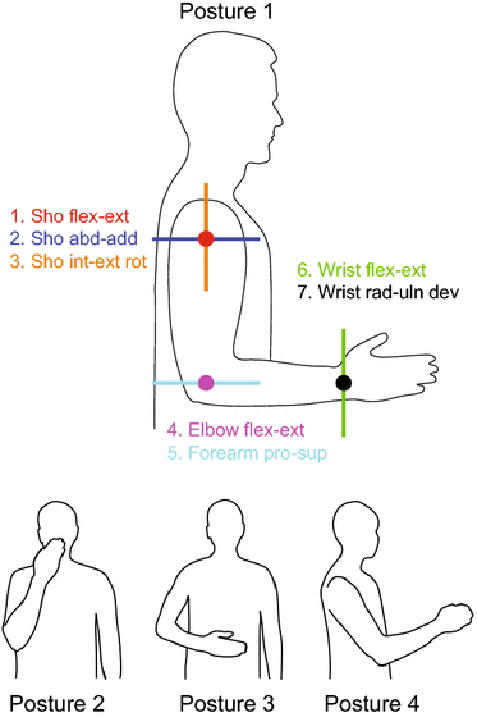
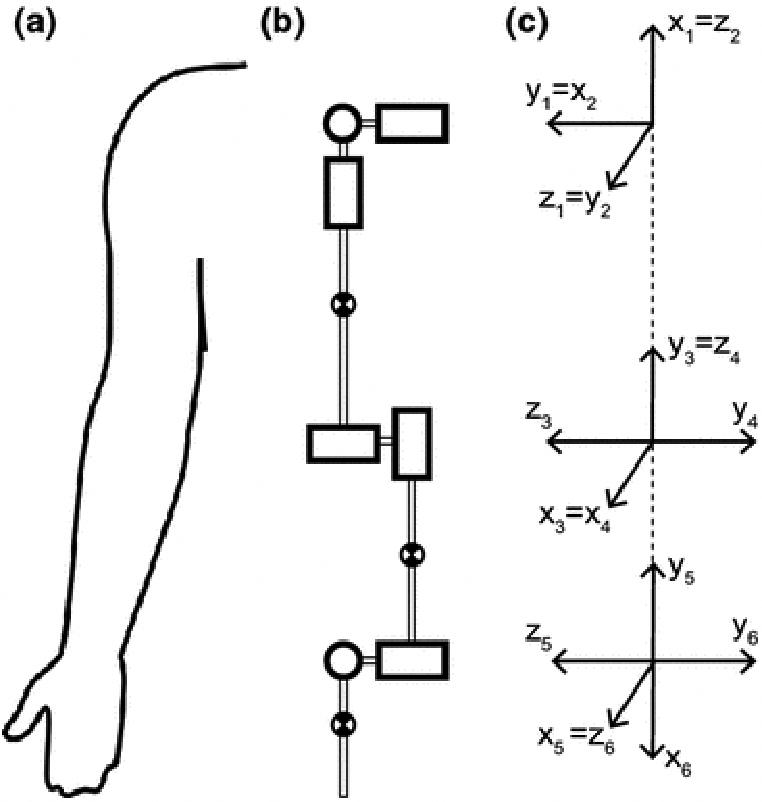
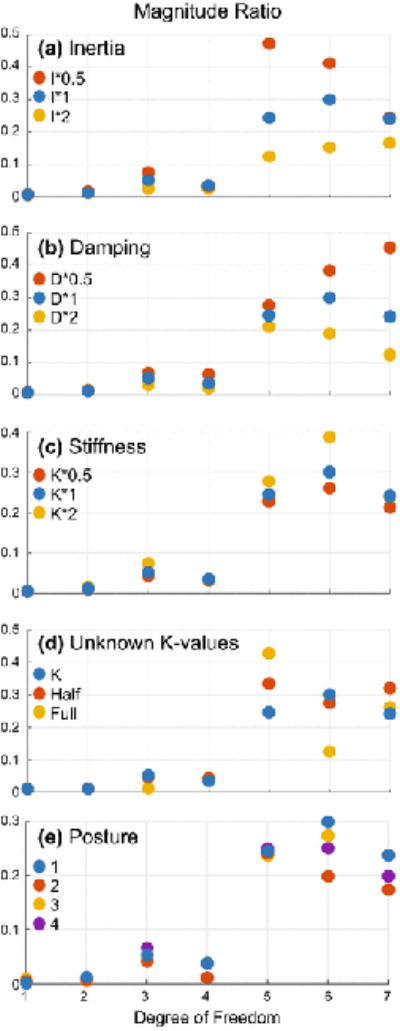
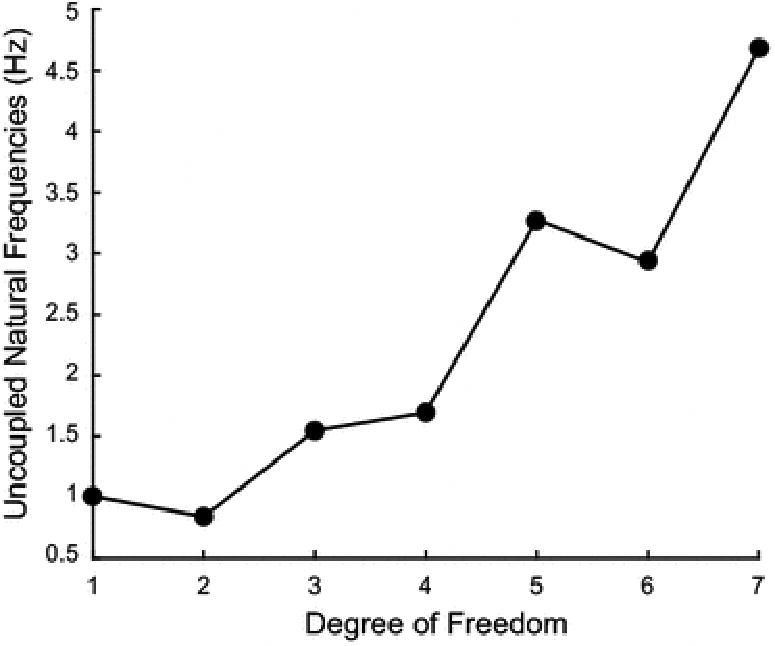
Although tremor is the most common movement disorder, there exist few effective tremor-suppressing devices, in part because the characteristics of tremor throughout the upper limb are unknown. To clarify, optimally suppressing tremor requires a knowledge of the mechanical origin, propagation, and distribution of tremor throughout the upper limb. Here we present the first systematic investigation of how tremor propagates between the shoulder, elbow, forearm, and wrist. We simulated tremor propagation using a linear, time-invariant, lumped-parameter model relating joint torques and the resulting joint displacements. The model focused on the seven main degrees of freedom from the shoulder to the wrist and included coupled joint inertia, damping, and stiffness. We deliberately implemented a simple model to focus first on the most basic effects. Simulating tremorogenic joint torque as a sinusoidal input, we used the model to establish fundamental principles describing how input parameters (torque location and frequency) and joint impedance (inertia, damping, and stiffness) affect tremor propagation. We expect that the methods and principles presented here will serve as the groundwork for future refining studies to understand the origin, propagation, and distribution of tremor throughout the upper limb in order to enable the future development of optimal tremor-suppressing devices.
Keywords: Essential tremor; Frequency response; Impedance; Parkinson’s disease; System dynamics; Tremor suppression.
Conflict of interest statement
Figures
References
-
- Aisen ML, Arnold A, Baiges I, Maxwell S, Rosen M. The effect of mechanical damping loads on disabling action tremor. Neurol. 1993;43 - PubMed
-
- Charles SK, Hogan N. Dynamics of wrist rotations. Journal of Biomechanics. 2011;44:614–621. - PubMed
-
- Charles SK, Hogan N. Stiffness, not inertial coupling, determines path curvature of wrist motions. Journal of Neurophysiology. 2012;107:1230–1240. - PubMed
-
- Colacino FM, Rustighi E, Mace BR. Subject-specific musculoskeletal parameters of wrist flexors and extensors estimated by an EMG-driven musculoskeletal model. Medical Engineering & Physics. 2012;34:531–540. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
