

Recent Progress in Electronic Skin
- PMID: 27980911
- PMCID: PMC5115318
- DOI: 10.1002/advs.201500169
Recent Progress in Electronic Skin
Abstract
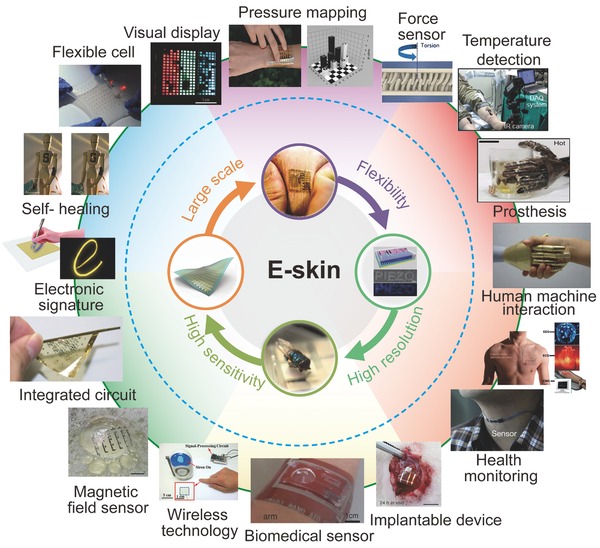
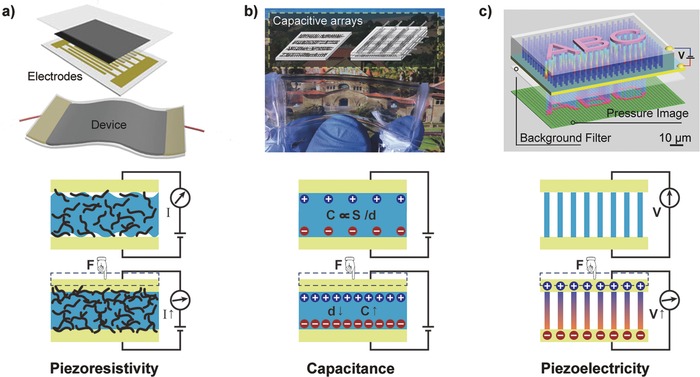
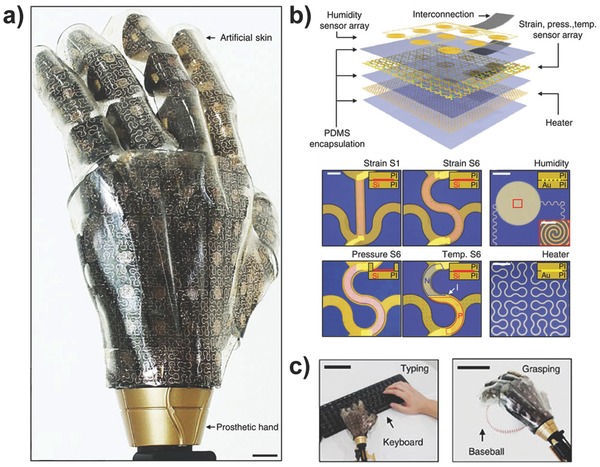
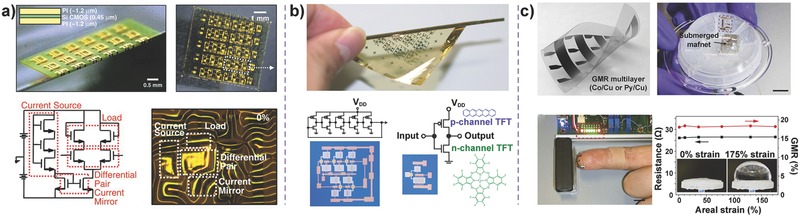
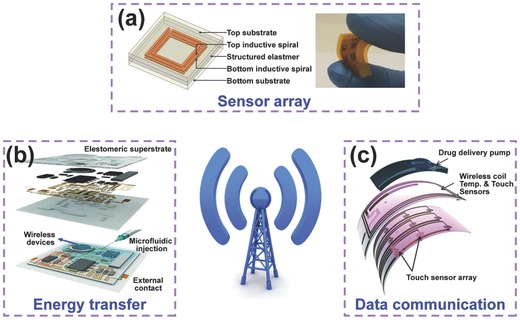
The skin is the largest organ of the human body and can sense pressure, temperature, and other complex environmental stimuli or conditions. The mimicry of human skin's sensory ability via electronics is a topic of innovative research that could find broad applications in robotics, artificial intelligence, and human-machine interfaces, all of which promote the development of electronic skin (e-skin). To imitate tactile sensing via e-skins, flexible and stretchable pressure sensor arrays are constructed based on different transduction mechanisms and structural designs. These arrays can map pressure with high resolution and rapid response beyond that of human perception. Multi-modal force sensing, temperature, and humidity detection, as well as self-healing abilities are also exploited for multi-functional e-skins. Other recent progress in this field includes the integration with high-density flexible circuits for signal processing, the combination with wireless technology for convenient sensing and energy/data transfer, and the development of self-powered e-skins. Future opportunities lie in the fabrication of highly intelligent e-skins that can sense and respond to variations in the external environment. The rapidly increasing innovations in this area will be important to the scientific community and to the future of human life.
Keywords: electronic skin; flexible; multifunctional device; pressure mapping; tactile sensor.
Figures
Similar articles
-
Materials, Structures, and Functions for Flexible and Stretchable Biomimetic Sensors.Acc Chem Res. 2019 Feb 19;52(2):288-296. doi: 10.1021/acs.accounts.8b00497. Epub 2019 Jan 17. Acc Chem Res. 2019. PMID: 30653299 Review.
-
Advances in Biodegradable Electronic Skin: Material Progress and Recent Applications in Sensing, Robotics, and Human-Machine Interfaces.Adv Mater. 2023 Jan;35(4):e2203193. doi: 10.1002/adma.202203193. Epub 2022 Nov 30. Adv Mater. 2023. PMID: 35737931 Review.
-
Recent Progress in Flexible Pressure Sensor Arrays.Nanomaterials (Basel). 2022 Jul 20;12(14):2495. doi: 10.3390/nano12142495. Nanomaterials (Basel). 2022. PMID: 35889718 Free PMC article. Review.
-
Flexible Pressure, Humidity, and Temperature Sensors for Human Health Monitoring.Adv Healthc Mater. 2024 Dec;13(31):e2401532. doi: 10.1002/adhm.202401532. Epub 2024 Sep 17. Adv Healthc Mater. 2024. PMID: 39285808 Review.
-
Flexible integrated sensor with asymmetric structure for simultaneously 3D tactile and thermal sensing.Biosens Bioelectron. 2023 Mar 15;224:115054. doi: 10.1016/j.bios.2022.115054. Epub 2022 Dec 29. Biosens Bioelectron. 2023. PMID: 36603284
Cited by
-
Solution-Processed Bilayer Dielectrics for Flexible Low-Voltage Organic Field-Effect Transistors in Pressure-Sensing Applications.Adv Sci (Weinh). 2018 Jul 11;5(9):1701041. doi: 10.1002/advs.201701041. eCollection 2018 Sep. Adv Sci (Weinh). 2018. PMID: 30250779 Free PMC article.
-
Hierarchical Network Enabled Flexible Textile Pressure Sensor with Ultrabroad Response Range and High-Temperature Resistance.Adv Sci (Weinh). 2022 May;9(14):e2105738. doi: 10.1002/advs.202105738. Epub 2022 Mar 14. Adv Sci (Weinh). 2022. PMID: 35289123 Free PMC article.
-
Recent Advancements in Liquid Metal Flexible Printed Electronics: Properties, Technologies, and Applications.Micromachines (Basel). 2016 Nov 30;7(12):206. doi: 10.3390/mi7120206. Micromachines (Basel). 2016. PMID: 30404387 Free PMC article. Review.
-
A multi-point heart rate monitoring using a soft wearable system based on fiber optic technology.Sci Rep. 2021 Oct 27;11(1):21162. doi: 10.1038/s41598-021-00574-2. Sci Rep. 2021. PMID: 34707131 Free PMC article.
-
Morphological Engineering of Sensing Materials for Flexible Pressure Sensors and Artificial Intelligence Applications.Nanomicro Lett. 2022 Jul 5;14(1):141. doi: 10.1007/s40820-022-00874-w. Nanomicro Lett. 2022. PMID: 35789444 Free PMC article. Review.
References
-
- a) Maheshwari V., Saraf R. F., Angew. Chem., Int. Ed. 2008, 47, 7808; - PubMed
- b) Hammock M. L., Chortos A., Tee B. C. K., Tok J. B. H., Bao Z., Adv. Mater. 2013, 25, 5997; - PubMed
- c) Guo C., Yu Y., Liu J., J. Mater. Chem. B 2014, 2, 5739; - PubMed
- d) Jung S., Kim J. H., Kim J., Choi S., Lee J., Park I., Hyeon T., Kim D.‐H., Adv. Mater. 2014, 26, 4825; - PubMed
- e) Lee J., Kim S., Lee J., Yang D., Park B. C., Ryu S., Park I., Nanoscale 2014, 6, 11932; - PubMed
- f) Wang X.‐Q., Wang C.‐F., Zhou Z.‐F., Chen S., Adv. Opt. Mater. 2014, 2, 652;
- g) Sekitani T., Someya T., Mrs Bull. 2012, 37, 236.
-
- a) Jiang F. K., Tai Y. C., Walsh K., Tsao T., Lee G. B., Ho C. M., in Proc. IEEE Tenth Annu. Int. Workshop on Micro. Electro. Mech. Syst., Nagoya, Japan: 1997, 465;
- b) Lacour S. P., Wagner S., Huang Z. Y., Suo Z., Appl. Phys. Lett. 2003, 82, 2404.
LinkOut - more resources
Full Text Sources
Other Literature Sources