

Proximal-distal differences in movement smoothness reflect differences in biomechanics
- PMID: 28003410
- PMCID: PMC5350272
- DOI: 10.1152/jn.00712.2015
Proximal-distal differences in movement smoothness reflect differences in biomechanics
Abstract
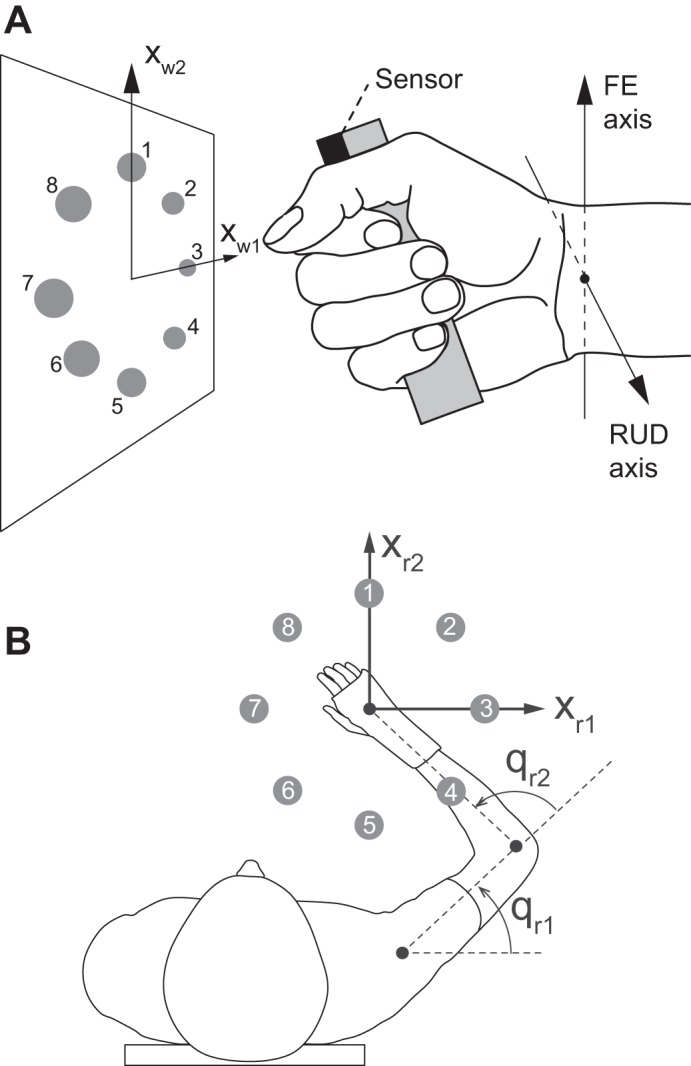
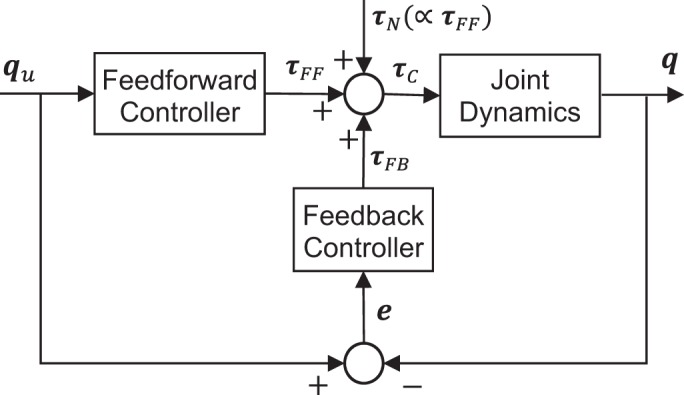
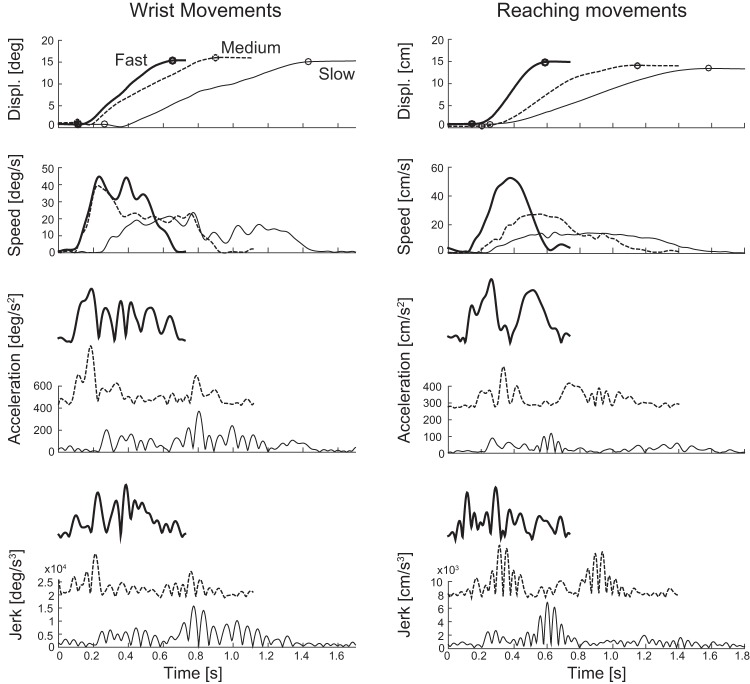
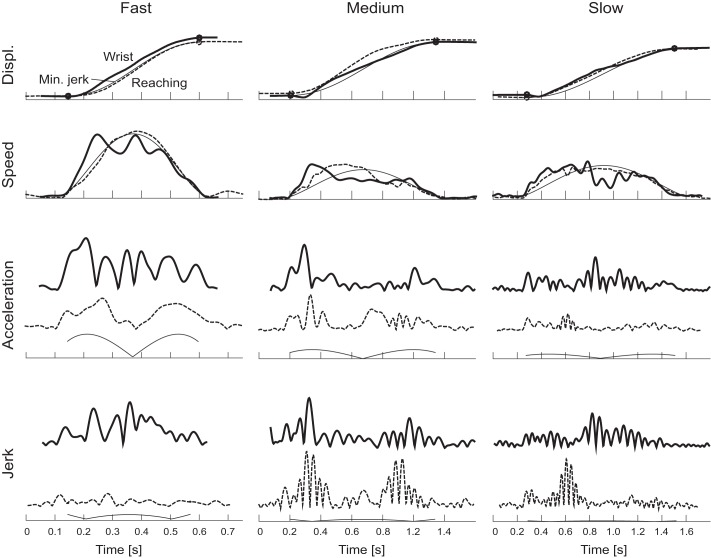
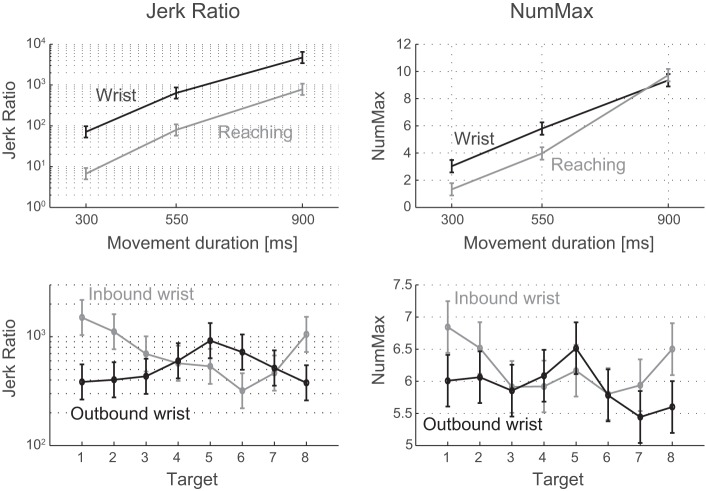
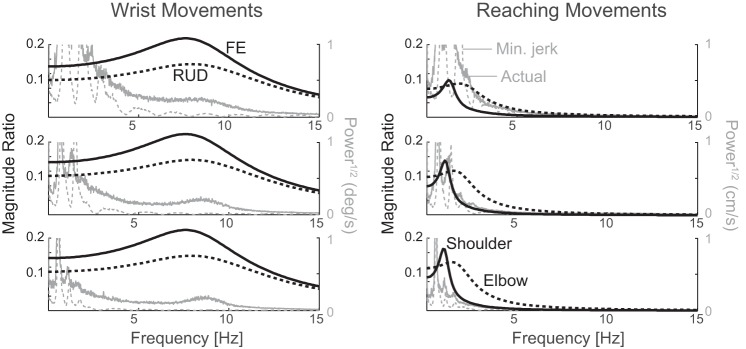
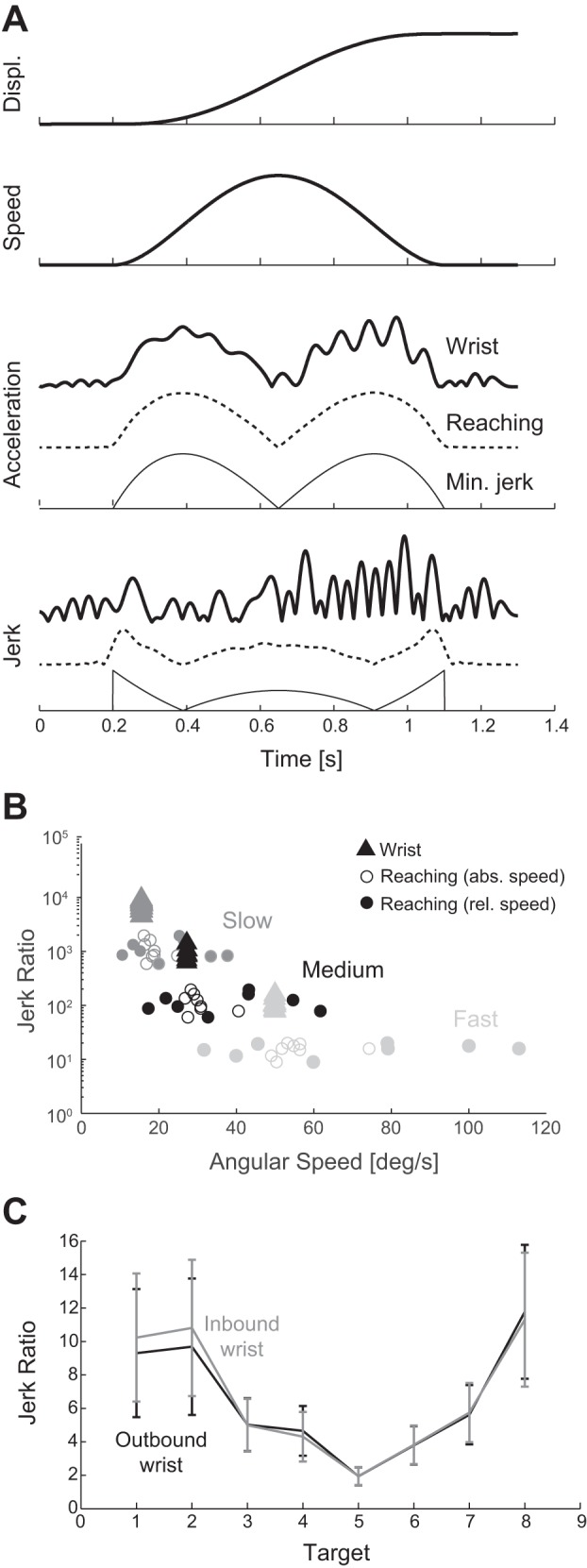
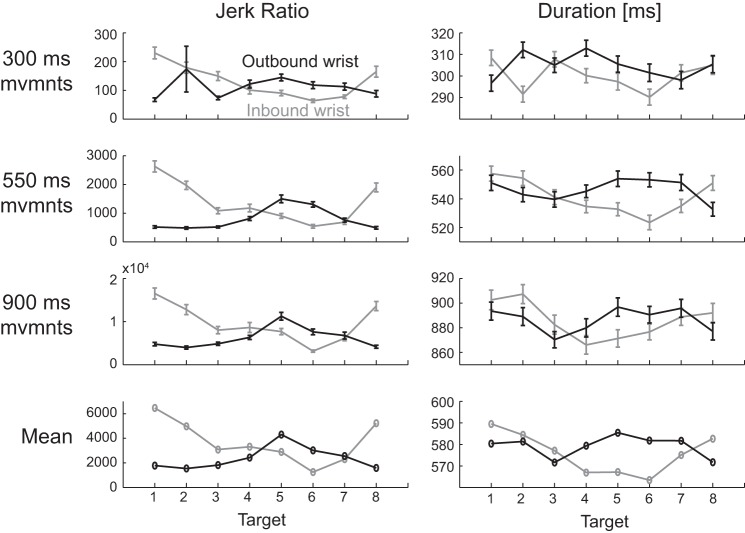
Smoothness is a hallmark of healthy movement. Past research indicates that smoothness may be a side product of a control strategy that minimizes error. However, this is not the only reason for smooth movements. Our musculoskeletal system itself contributes to movement smoothness: the mechanical impedance (inertia, damping, and stiffness) of our limbs and joints resists sudden change, resulting in a natural smoothing effect. How the biomechanics and neural control interact to result in an observed level of smoothness is not clear. The purpose of this study is to 1) characterize the smoothness of wrist rotations, 2) compare it with the smoothness of planar shoulder-elbow (reaching) movements, and 3) determine the cause of observed differences in smoothness. Ten healthy subjects performed wrist and reaching movements involving different targets, directions, and speeds. We found wrist movements to be significantly less smooth than reaching movements and to vary in smoothness with movement direction. To identify the causes underlying these observations, we tested a number of hypotheses involving differences in bandwidth, signal-dependent noise, speed, impedance anisotropy, and movement duration. Our simulations revealed that proximal-distal differences in smoothness reflect proximal-distal differences in biomechanics: the greater impedance of the shoulder-elbow filters neural noise more than the wrist. In contrast, differences in signal-dependent noise and speed were not sufficiently large to recreate the observed differences in smoothness. We also found that the variation in wrist movement smoothness with direction appear to be caused by, or at least correlated with, differences in movement duration, not impedance anisotropy.NEW & NOTEWORTHY This article presents the first thorough characterization of the smoothness of wrist rotations (flexion-extension and radial-ulnar deviation) and comparison with the smoothness of reaching (shoulder-elbow) movements. We found wrist rotations to be significantly less smooth than reaching movements and determined that this difference reflects proximal-distal differences in biomechanics: the greater impedance (inertia, damping, stiffness) of the shoulder-elbow filters noise in the command signal more than the impedance of the wrist.
Keywords: filter; impedance; jerk; kinematics; smoothness.
Copyright © 2017 the American Physiological Society.
Figures
Similar articles
-
Dynamics of wrist rotations.J Biomech. 2011 Feb 24;44(4):614-21. doi: 10.1016/j.jbiomech.2010.11.016. Epub 2010 Dec 4. J Biomech. 2011. PMID: 21130996
-
Proximal versus distal control of two-joint planar reaching movements in the presence of neuromuscular noise.J Biomech Eng. 2012 Jun;134(6):061007. doi: 10.1115/1.4006811. J Biomech Eng. 2012. PMID: 22757504 Free PMC article.
-
Dynamics of wrist and forearm rotations.J Biomech. 2014 Aug 22;47(11):2779-85. doi: 10.1016/j.jbiomech.2014.01.053. Epub 2014 Mar 13. J Biomech. 2014. PMID: 24745814
-
[Functional anatomy and biomechanics of the carpus].Radiologe. 2006 Aug;46(8):638-48. doi: 10.1007/s00117-006-1397-0. Radiologe. 2006. PMID: 16896636 Review. German.
-
On the analysis of movement smoothness.J Neuroeng Rehabil. 2015 Dec 9;12:112. doi: 10.1186/s12984-015-0090-9. J Neuroeng Rehabil. 2015. PMID: 26651329 Free PMC article. Review.
Cited by
-
Movement smoothness during dynamic postural control to a static target differs between autistic and neurotypical children.Gait Posture. 2023 Jan;99:76-82. doi: 10.1016/j.gaitpost.2022.10.015. Epub 2022 Oct 28. Gait Posture. 2023. PMID: 36335658 Free PMC article.
-
Effects of Trunk Motion, Touch, and Articulation on Upper-Limb Velocities and on Joint Contribution to Endpoint Velocities During the Production of Loud Piano Tones.Front Psychol. 2020 Jun 10;11:1159. doi: 10.3389/fpsyg.2020.01159. eCollection 2020. Front Psychol. 2020. PMID: 32587549 Free PMC article.
-
Biomechanical muscle stiffness measures of extensor digitorum explain potential mechanism of McArdle sign.Clin Biomech (Bristol). 2021 Feb;82:105277. doi: 10.1016/j.clinbiomech.2021.105277. Epub 2021 Jan 23. Clin Biomech (Bristol). 2021. PMID: 33513456 Free PMC article.
-
Extended physiological proprioception is affected by transhumeral Socket-Suspended prosthesis use.J Biomech. 2024 Mar;166:112054. doi: 10.1016/j.jbiomech.2024.112054. Epub 2024 Mar 20. J Biomech. 2024. PMID: 38513398 Free PMC article.
-
Fundamental Principles of Tremor Propagation in the Upper Limb.Ann Biomed Eng. 2017 Apr;45(4):1133-1147. doi: 10.1007/s10439-016-1765-5. Epub 2016 Dec 12. Ann Biomed Eng. 2017. PMID: 27957608 Free PMC article.
References
-
- Bennett DJ. Torques generated at the human elbow joint in response to constant position errors imposed during voluntary movements. Exp Brain Res 95: 488–498, 1993. - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous