

Spatial cognition in a virtual reality home-cage extension for freely moving rodents
- PMID: 28077665
- PMCID: PMC5384973
- DOI: 10.1152/jn.00630.2016
Spatial cognition in a virtual reality home-cage extension for freely moving rodents
Abstract
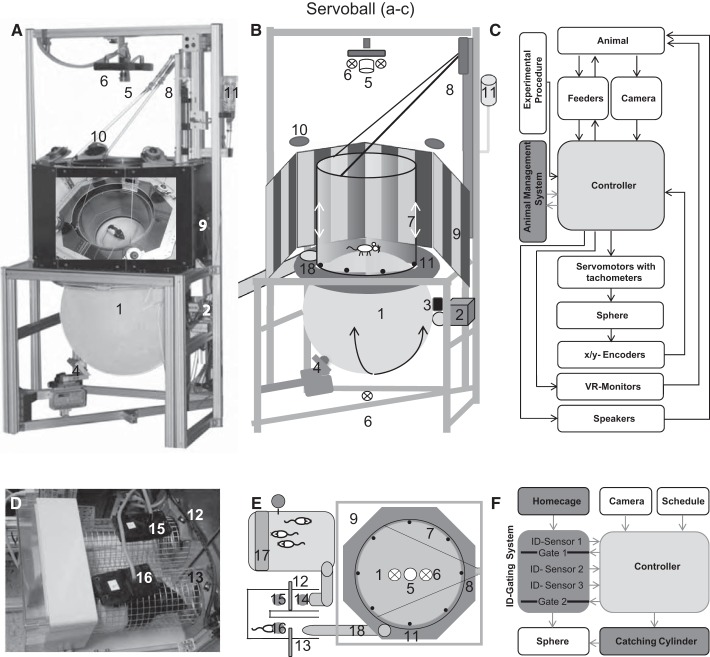
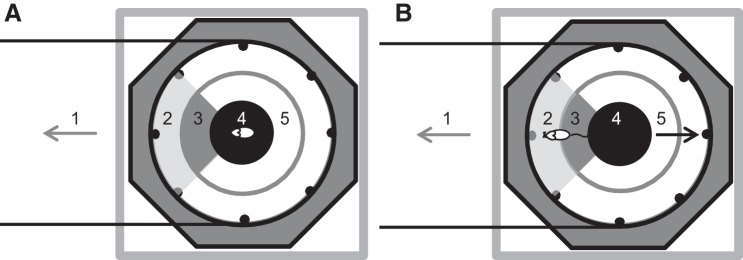
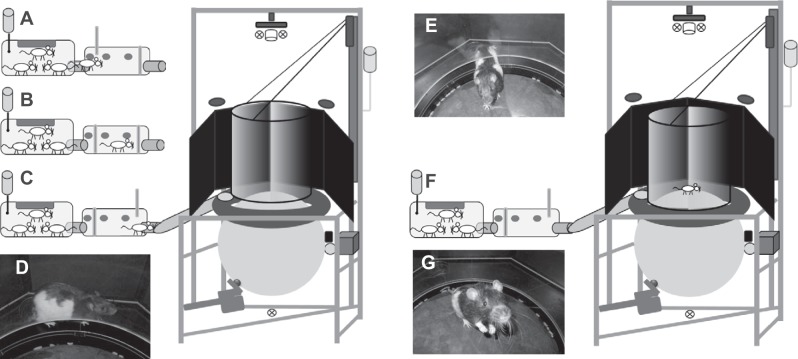
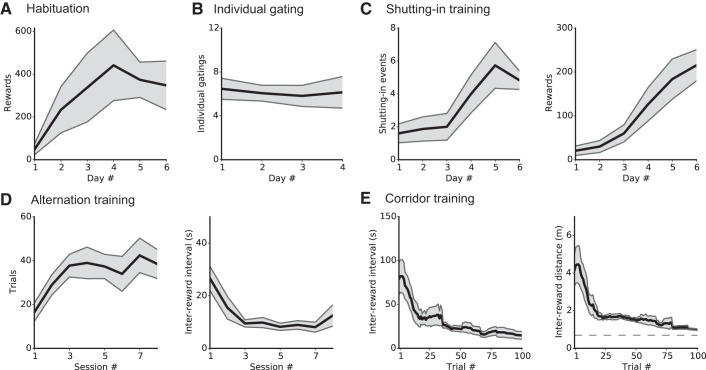
Virtual reality (VR) environments are a powerful tool to investigate brain mechanisms involved in the behavior of animals. With this technique, animals are usually head fixed or secured in a harness, and training for cognitively more complex VR paradigms is time consuming. A VR apparatus allowing free animal movement and the constant operator-independent training of tasks would enable many new applications. Key prospective usages include brain imaging of animal behavior when carrying a miniaturized mobile device such as a fluorescence microscope or an optetrode. Here, we introduce the Servoball, a spherical VR treadmill based on the closed-loop tracking of a freely moving animal and feedback counterrotation of the ball. Furthermore, we present the complete integration of this experimental system with the animals' group home cage, from which single individuals can voluntarily enter through a tunnel with radio-frequency identification (RFID)-automated access control and commence experiments. This automated animal sorter functions as a mechanical replacement of the experimenter. We automatically trained rats using visual or acoustic cues to solve spatial cognitive tasks and recorded spatially modulated entorhinal cells. When electrophysiological extracellular recordings from awake behaving rats were performed, head fixation can dramatically alter results, so that any complex behavior that requires head movement is impossible to achieve. We circumvented this problem with the use of the Servoball in open-field scenarios, as it allows the combination of open-field behavior with the recording of nerve cells, along with all the flexibility that a virtual environment brings. This integrated home cage with a VR arena experimental system permits highly efficient experimentation for complex cognitive experiments.NEW & NOTEWORTHY Virtual reality (VR) environments are a powerful tool for the investigation of brain mechanisms. We introduce the Servoball, a VR treadmill for freely moving rodents. The Servoball is integrated with the animals' group home cage. Single individuals voluntarily enter using automated access control. Training is highly time-efficient, even for cognitively complex VR paradigms.
Keywords: 24/7; freely moving; operator independent; spatial cognition; virtual reality.
Copyright © 2017 the American Physiological Society.
Figures
References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources