

A spiking neural network model of 3D perception for event-based neuromorphic stereo vision systems
- PMID: 28079187
- PMCID: PMC5227683
- DOI: 10.1038/srep40703
A spiking neural network model of 3D perception for event-based neuromorphic stereo vision systems
Erratum in
-
Corrigendum: A spiking neural network model of 3D perception for event-based neuromorphic stereo vision systems.Sci Rep. 2017 Mar 16;7:44722. doi: 10.1038/srep44722. Sci Rep. 2017. PMID: 28300192 Free PMC article. No abstract available.
Abstract
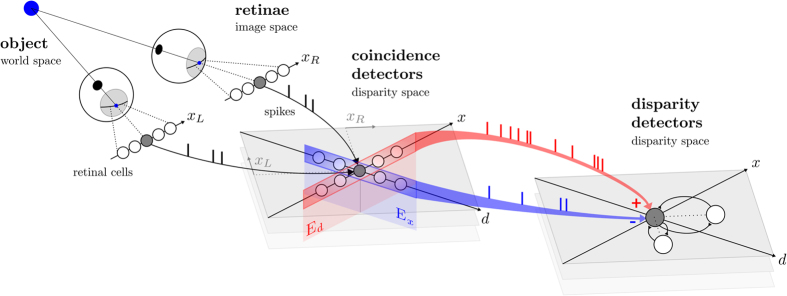
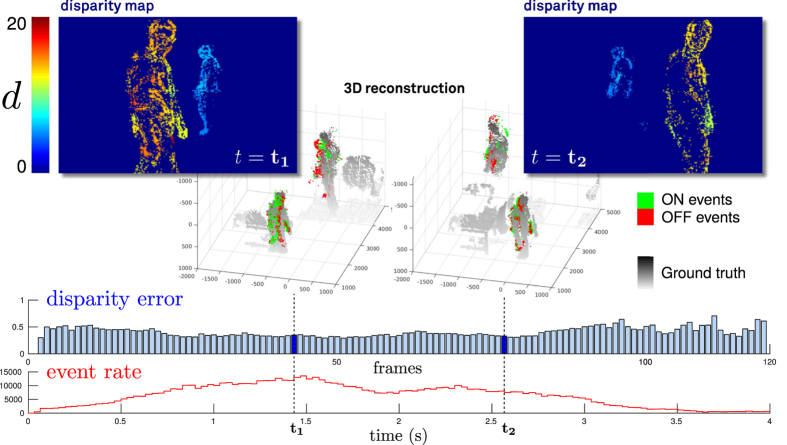
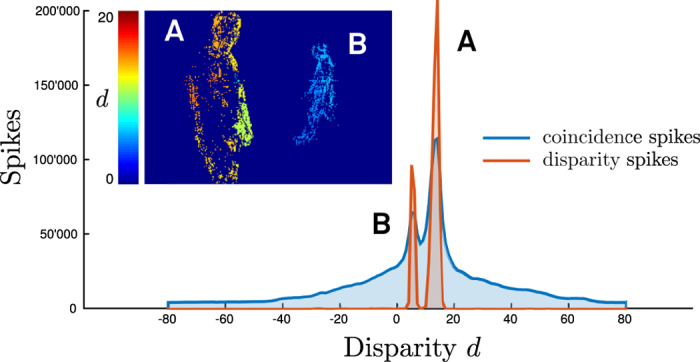
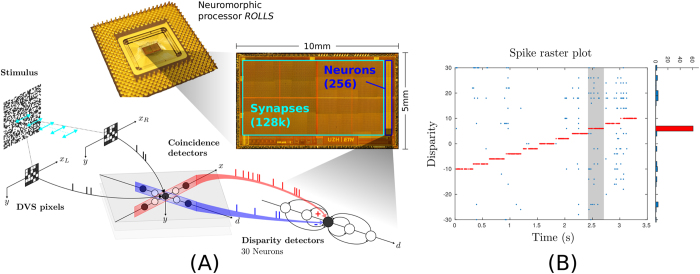
Stereo vision is an important feature that enables machine vision systems to perceive their environment in 3D. While machine vision has spawned a variety of software algorithms to solve the stereo-correspondence problem, their implementation and integration in small, fast, and efficient hardware vision systems remains a difficult challenge. Recent advances made in neuromorphic engineering offer a possible solution to this problem, with the use of a new class of event-based vision sensors and neural processing devices inspired by the organizing principles of the brain. Here we propose a radically novel model that solves the stereo-correspondence problem with a spiking neural network that can be directly implemented with massively parallel, compact, low-latency and low-power neuromorphic engineering devices. We validate the model with experimental results, highlighting features that are in agreement with both computational neuroscience stereo vision theories and experimental findings. We demonstrate its features with a prototype neuromorphic hardware system and provide testable predictions on the role of spike-based representations and temporal dynamics in biological stereo vision processing systems.
Figures

References
-
- Tippetts B., Lee D. J., Lillywhite K. & Archibald J. Review of stereo vision algorithms and their suitability for resource-limited systems. Journal of Real-Time Image Processing 1–21 (2013).
-
- Barry B. et al.. Always-on vision processing unit for mobile applications. IEEE Micro 56–66 (2015).
-
- Chicca E., Stefanini F., Bartolozzi C. & Indiveri G. Neuromorphic electronic circuits for building autonomous cognitive systems. Proceedings of the IEEE 102, 1367–1388 (2014).
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
