

Delaying Ambulation Mode Transition Decisions Improves Accuracy of a Flexible Control System for Powered Knee-Ankle Prosthesis
- PMID: 28113980
- PMCID: PMC5653221
- DOI: 10.1109/TNSRE.2016.2613020
Delaying Ambulation Mode Transition Decisions Improves Accuracy of a Flexible Control System for Powered Knee-Ankle Prosthesis
Abstract
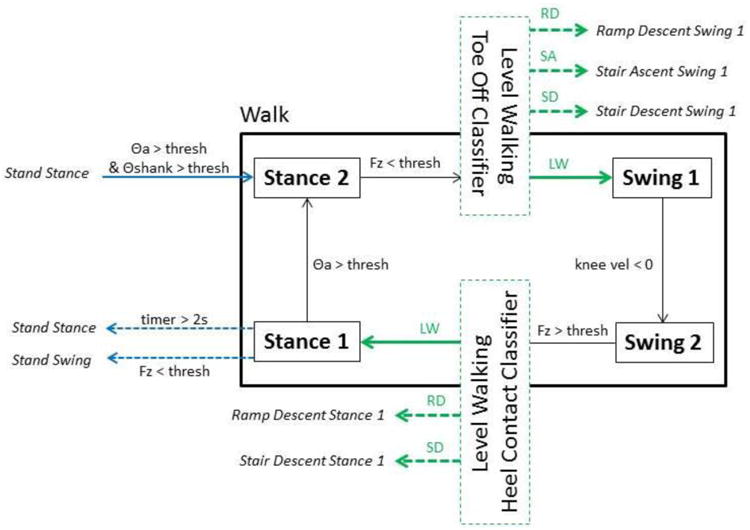
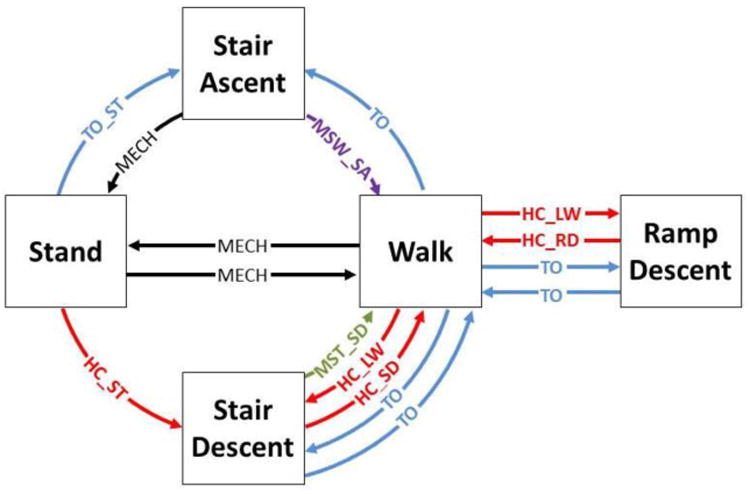
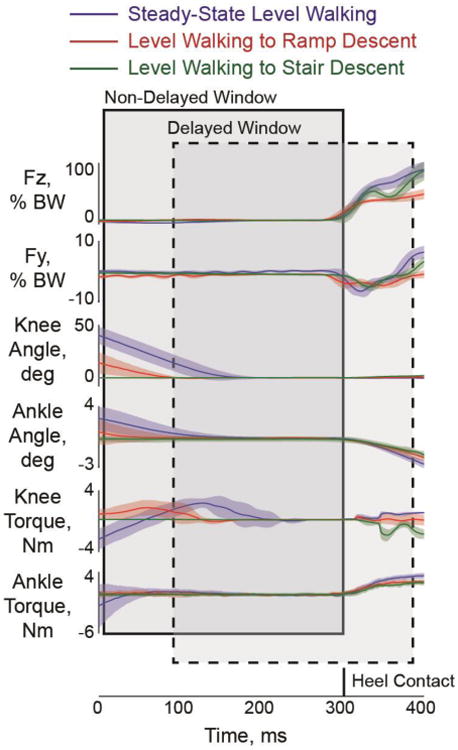
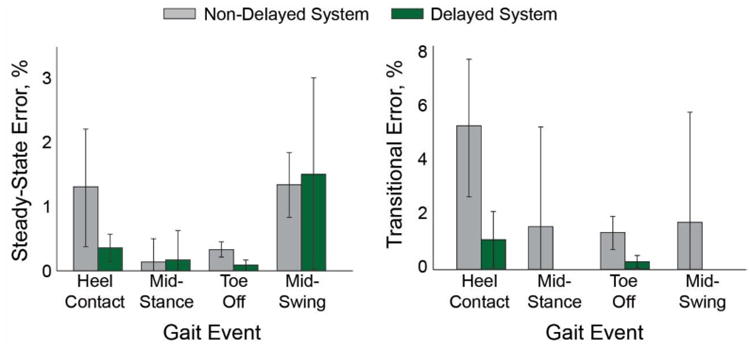
Powered lower limb prostheses can assist users in a variety of ambulation modes by providing knee and/or ankle joint power. This study's goal was to develop a flexible control system to allow users to perform a variety of tasks in a natural, accurate, and reliable way. Six transfemoral amputees used a powered knee-ankle prosthesis to ascend/descend a ramp, climb a 3- and 4-step staircase, perform walking and standing transitions to and from the staircase, and ambulate at various speeds. A mode-specific classification architecture was developed to allow seamless transitions at four discrete gait events. Prosthesis mode transitions (i.e., the prosthesis' mechanical response) were delayed by 90 ms. Overall, users were not affected by this small delay. Offline classification results demonstrate significantly reduced error rates with the delayed system compared to the non-delayed system (p < 0.001). The average error rate for all heel contact decisions was 1.65% [0.99%] for the non-delayed system and 0.43% [0.23%] for the delayed system. The average error rate for all toe off decisions was 0.47% [0.16%] for the non-delayed system and 0.13% [0.05%] for the delayed system. The results are encouraging and provide another step towards a clinically viable intent recognition system for a powered knee-ankle prosthesis.
Figures

References
-
- Au S, Berniker M, Herr H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Networks. 2008;21:654–666. - PubMed
-
- OSSUR. The POWER KNEE. The POWER KNEE, editor. http://bionics.ossur.com/Products/POWER-KNEE/SENSE.
-
- Bellman RD, Holgate MA, Sugar TG. SPARKy 3: Design of an active robotic ankle prosthesis with two actuated degrees of freedom using regenerative kinetics. presented at the IEEE/RAS-EMBS International Conferernce on Biomedical Robotics and Biomechatronics; Scottsdale, AZ, USA. 2008.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
