

Target Uncertainty Mediates Sensorimotor Error Correction
- PMID: 28129323
- PMCID: PMC5271325
- DOI: 10.1371/journal.pone.0170466
Target Uncertainty Mediates Sensorimotor Error Correction
Abstract
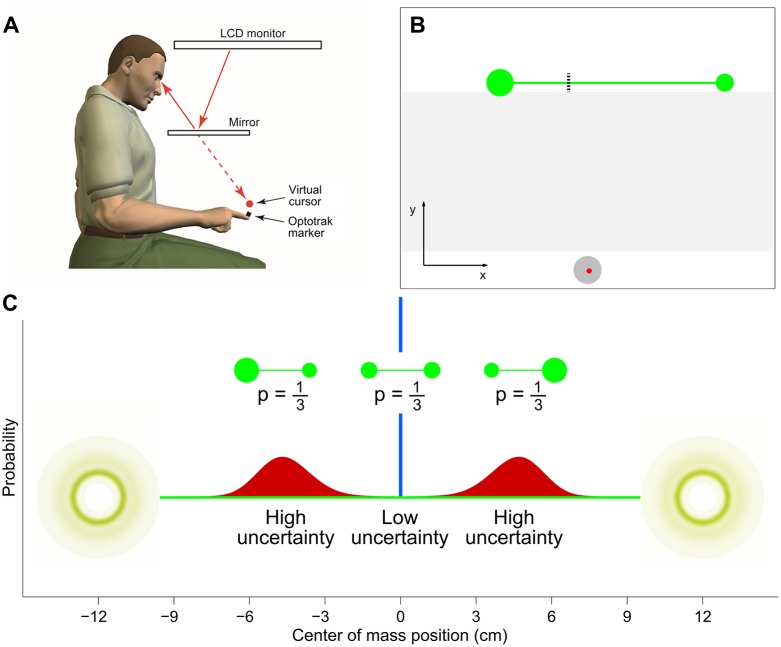
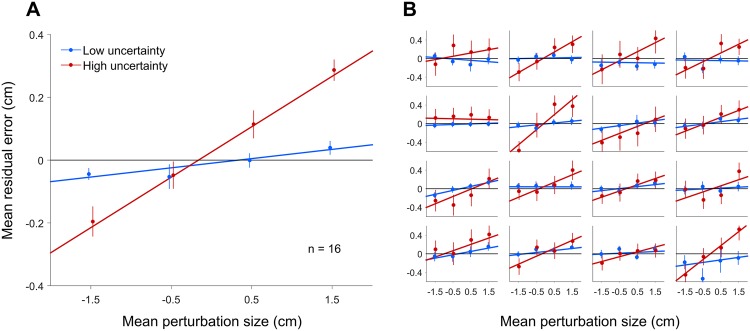
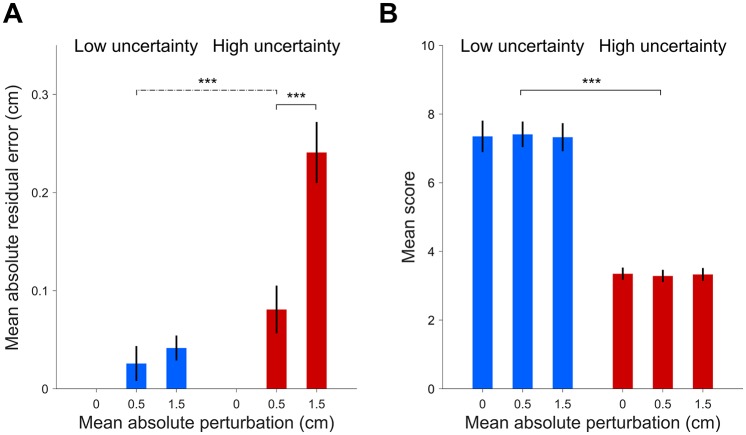
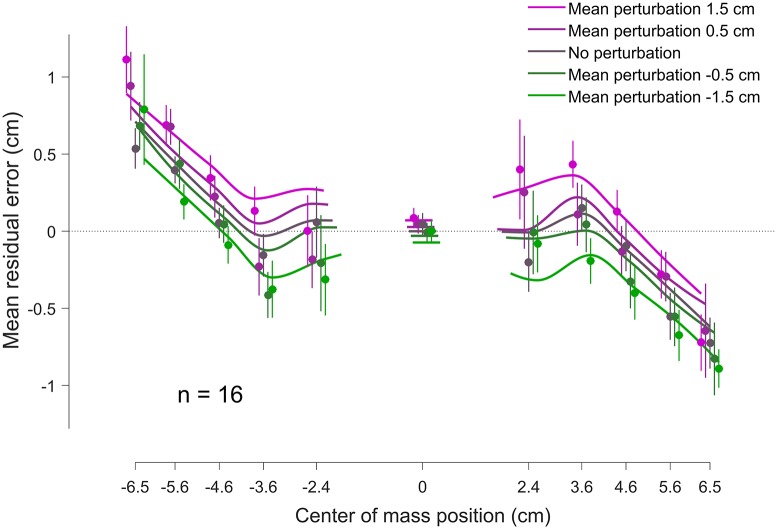
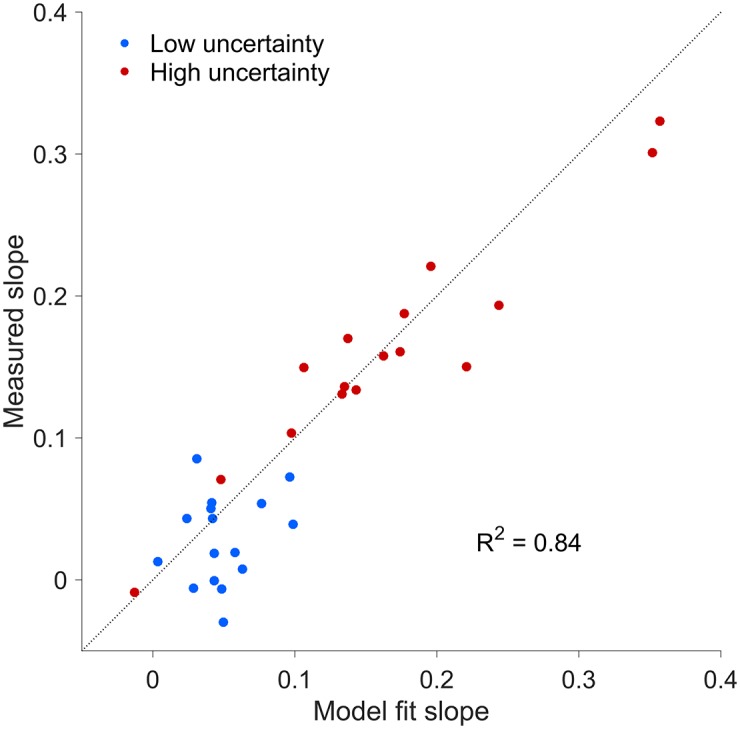
Human movements are prone to errors that arise from inaccuracies in both our perceptual processing and execution of motor commands. We can reduce such errors by both improving our estimates of the state of the world and through online error correction of the ongoing action. Two prominent frameworks that explain how humans solve these problems are Bayesian estimation and stochastic optimal feedback control. Here we examine the interaction between estimation and control by asking if uncertainty in estimates affects how subjects correct for errors that may arise during the movement. Unbeknownst to participants, we randomly shifted the visual feedback of their finger position as they reached to indicate the center of mass of an object. Even though participants were given ample time to compensate for this perturbation, they only fully corrected for the induced error on trials with low uncertainty about center of mass, with correction only partial in trials involving more uncertainty. The analysis of subjects' scores revealed that participants corrected for errors just enough to avoid significant decrease in their overall scores, in agreement with the minimal intervention principle of optimal feedback control. We explain this behavior with a term in the loss function that accounts for the additional effort of adjusting one's response. By suggesting that subjects' decision uncertainty, as reflected in their posterior distribution, is a major factor in determining how their sensorimotor system responds to error, our findings support theoretical models in which the decision making and control processes are fully integrated.
Conflict of interest statement
I have read the journal's policy and the authors of this manuscript have the following competing interests: SV received funding from Microsoft Research as Microsoft Senior Research Fellow in Learning Robotics. This does not alter our adherence to PLOS ONE policies on sharing data and materials.
Figures
References
-
- Simoncelli EP. Optimal estimation in sensory systems In: Gazzaniga MS, editor. The cognitive neurosciences, IV edition MIT Press; 2009. p. 525–535.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
