

Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water
- PMID: 28145412
- PMCID: PMC5296644
- DOI: 10.1038/ncomms14230
Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water
Abstract
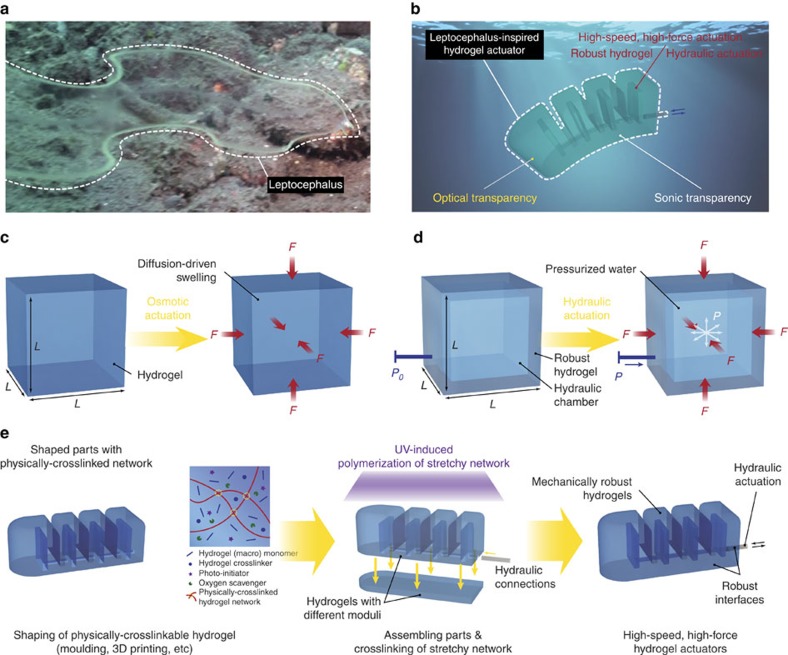
Sea animals such as leptocephali develop tissues and organs composed of active transparent hydrogels to achieve agile motions and natural camouflage in water. Hydrogel-based actuators that can imitate the capabilities of leptocephali will enable new applications in diverse fields. However, existing hydrogel actuators, mostly osmotic-driven, are intrinsically low-speed and/or low-force; and their camouflage capabilities have not been explored. Here we show that hydraulic actuations of hydrogels with designed structures and properties can give soft actuators and robots that are high-speed, high-force, and optically and sonically camouflaged in water. The hydrogel actuators and robots can maintain their robustness and functionality over multiple cycles of actuations, owing to the anti-fatigue property of the hydrogel under moderate stresses. We further demonstrate that the agile and transparent hydrogel actuators and robots perform extraordinary functions including swimming, kicking rubber-balls and even catching a live fish in water.
Conflict of interest statement
The authors declare no competing financial interests.
Figures





Similar articles
-
Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions.Acc Chem Res. 2022 Jun 7;55(11):1533-1545. doi: 10.1021/acs.accounts.2c00046. Epub 2022 Apr 12. Acc Chem Res. 2022. PMID: 35413187
-
Transparent Soft Actuators/Sensors and Camouflage Skins for Imperceptible Soft Robotics.Adv Mater. 2021 May;33(19):e2002397. doi: 10.1002/adma.202002397. Epub 2020 Oct 21. Adv Mater. 2021. PMID: 33089569 Review.
-
Near-Infrared Light-Driven Shape-Programmable Hydrogel Actuators Loaded with Metal-Organic Frameworks.ACS Appl Mater Interfaces. 2022 Mar 9;14(9):11834-11841. doi: 10.1021/acsami.1c24702. Epub 2022 Feb 22. ACS Appl Mater Interfaces. 2022. PMID: 35192332
-
Special section on biomimetics of movement.Bioinspir Biomim. 2011 Dec;6(4):040201. doi: 10.1088/1748-3182/6/4/040201. Epub 2011 Nov 29. Bioinspir Biomim. 2011. PMID: 22128305
-
Muscle-like hydrogels with fast isochoric responses and their applications as soft robots: a minireview.Mater Horiz. 2025 Feb 3;12(3):719-733. doi: 10.1039/d4mh01187b. Mater Horiz. 2025. PMID: 39530734 Review.
Cited by
-
A Hydrogel-Based Self-Sensing Underwater Actuator.Micromachines (Basel). 2022 Oct 19;13(10):1779. doi: 10.3390/mi13101779. Micromachines (Basel). 2022. PMID: 36296132 Free PMC article.
-
Embedded shape morphing for morphologically adaptive robots.Nat Commun. 2023 Sep 27;14(1):6023. doi: 10.1038/s41467-023-41708-6. Nat Commun. 2023. PMID: 37758737 Free PMC article.
-
Hydrogel Actuators and Sensors for Biomedical Soft Robots: Brief Overview with Impending Challenges.Biomimetics (Basel). 2018 Jul 10;3(3):15. doi: 10.3390/biomimetics3030015. Biomimetics (Basel). 2018. PMID: 31105237 Free PMC article. Review.
-
Electrolytic Characteristics of Microhole Array Manufacturing Using Polyacrylamide Electrolyte in 304 Stainless Steel.Micromachines (Basel). 2023 Sep 22;14(10):1808. doi: 10.3390/mi14101808. Micromachines (Basel). 2023. PMID: 37893245 Free PMC article.
-
Muscle-like fatigue-resistant hydrogels by mechanical training.Proc Natl Acad Sci U S A. 2019 May 21;116(21):10244-10249. doi: 10.1073/pnas.1903019116. Epub 2019 May 8. Proc Natl Acad Sci U S A. 2019. PMID: 31068458 Free PMC article.
References
-
- Johnsen S. Hidden in plain sight: the ecology and physiology of organismal transparency. Biol. Bull. 201, 301–318 (2001). - PubMed
-
- Miller M. J. et al.. Observations of large muraenid leptocephali in coastal Indonesia: locations of sightings and behaviour of the larvae. Mar. Biodivers. Rec. 6, e82 (2013).
-
- Lee K. Y. & Mooney D. J. Hydrogels for tissue engineering. Chem. Rev. 101, 1869–1880 (2001). - PubMed
-
- Morin S. A. et al.. Camouflage and display for soft machines. Science 337, 828–832 (2012). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
