

The Pioneer Anomaly
- PMID: 28163614
- PMCID: PMC5255541
- DOI: 10.12942/lrr-2010-4
The Pioneer Anomaly
Abstract
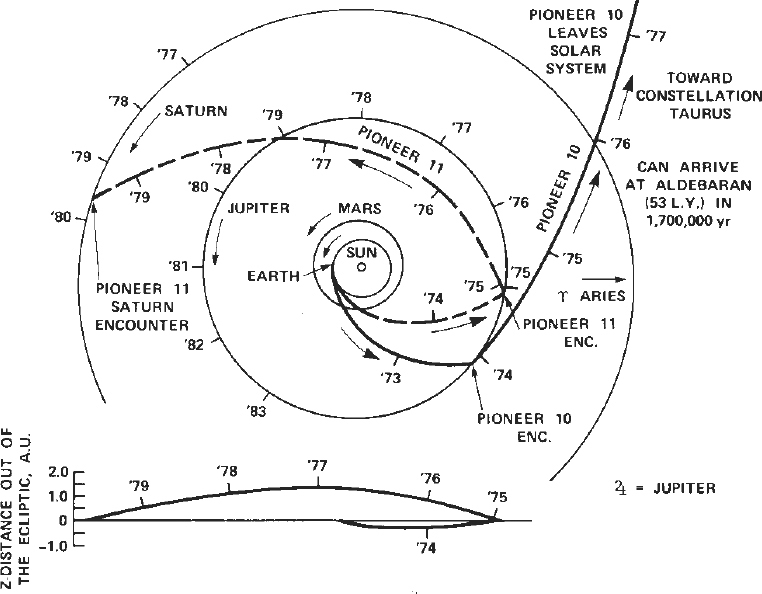
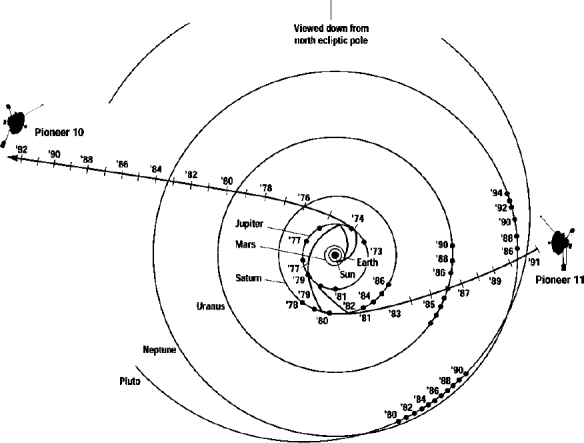
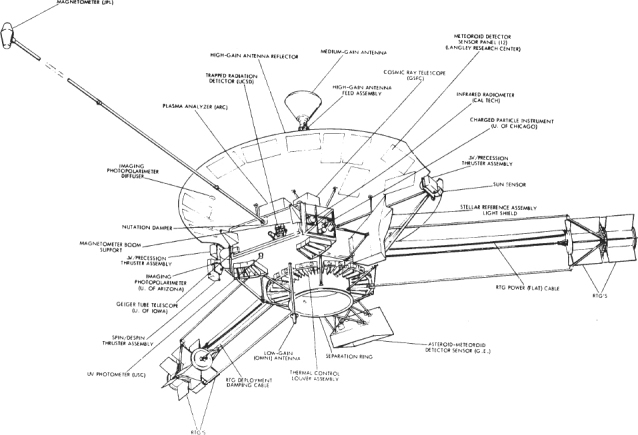
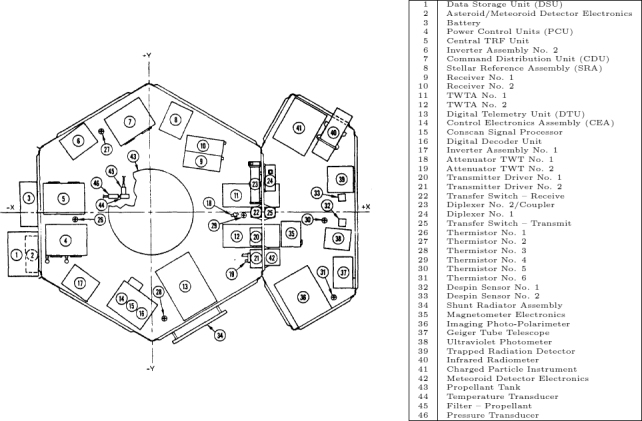
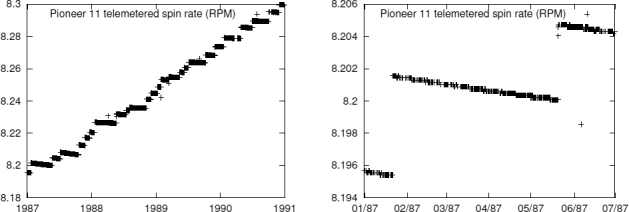
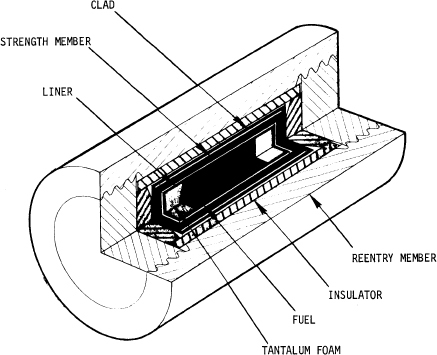
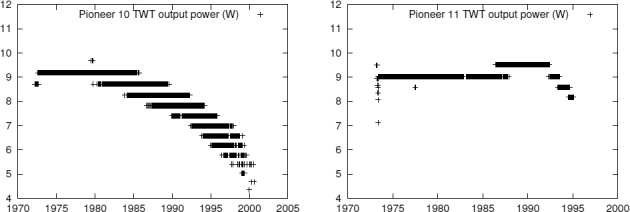
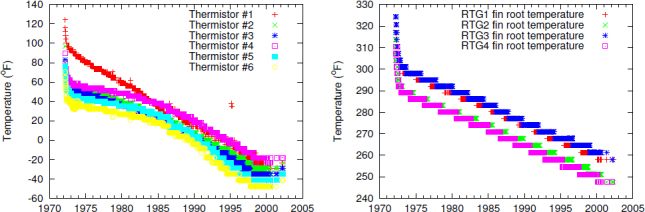
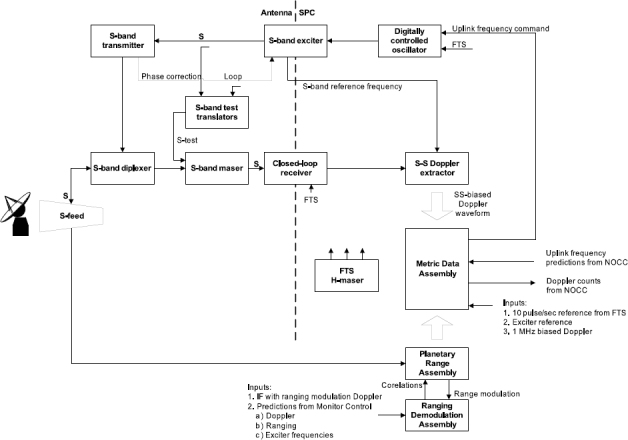
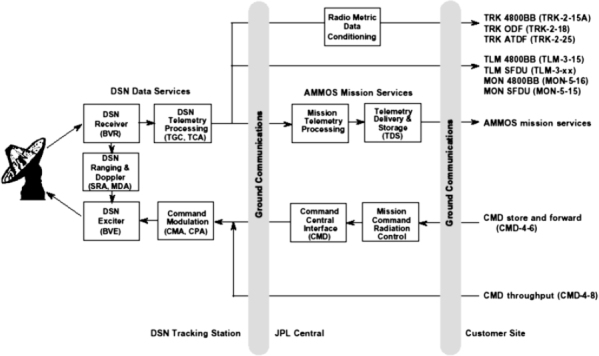
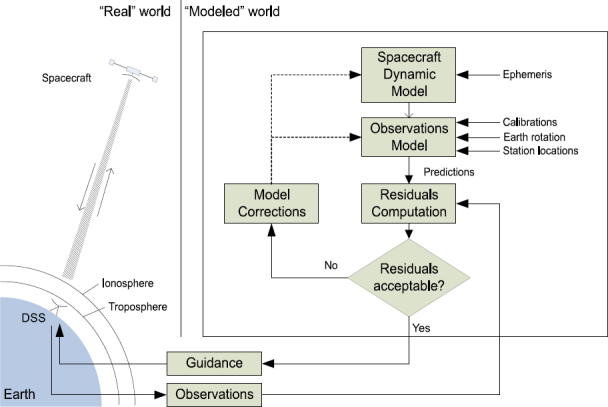
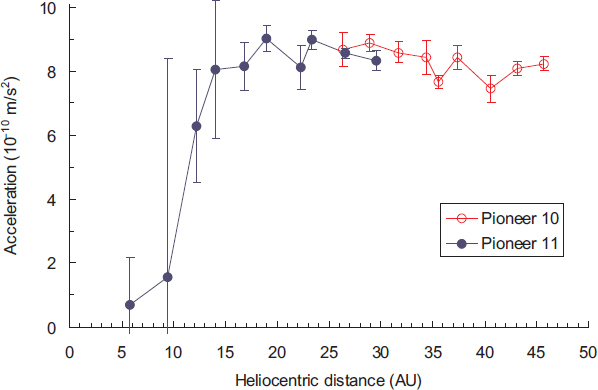
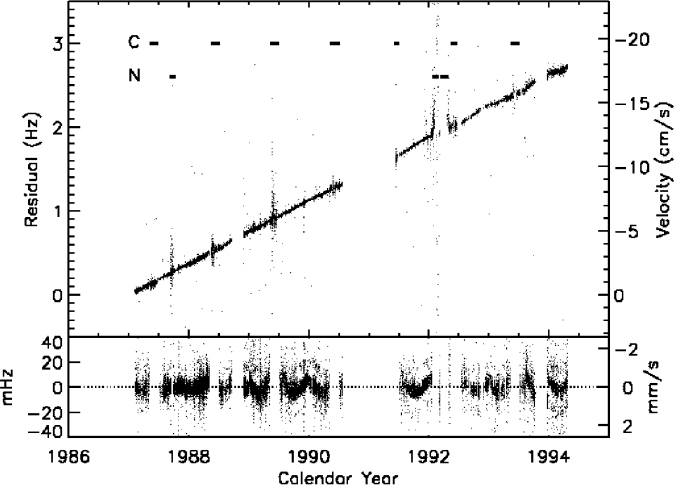
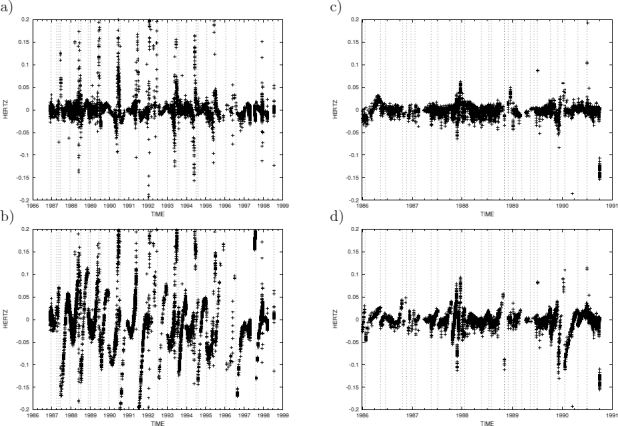
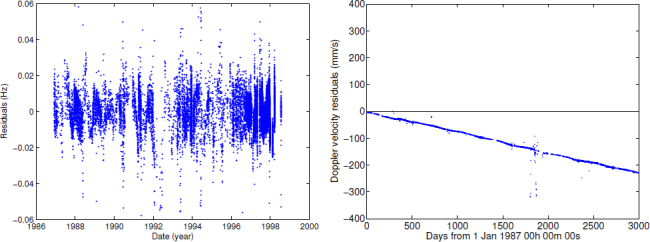
Radio-metric Doppler tracking data received from the Pioneer 10 and 11 spacecraft from heliocentric distances of 20-70 AU has consistently indicated the presence of a small, anomalous, blue-shifted frequency drift uniformly changing with a rate of ∼ 6 × 10-9 Hz/s. Ultimately, the drift was interpreted as a constant sunward deceleration of each particular spacecraft at the level of aP = (8.74 ± 1.33) × 10-10 m/s2. This apparent violation of the Newton's gravitational inverse-square law has become known as the Pioneer anomaly; the nature of this anomaly remains unexplained. In this review, we summarize the current knowledge of the physical properties of the anomaly and the conditions that led to its detection and characterization. We review various mechanisms proposed to explain the anomaly and discuss the current state of efforts to determine its nature. A comprehensive new investigation of the anomalous behavior of the two Pioneers has begun recently. The new efforts rely on the much-extended set of radio-metric Doppler data for both spacecraft in conjunction with the newly available complete record of their telemetry files and a large archive of original project documentation. As the new study is yet to report its findings, this review provides the necessary background for the new results to appear in the near future. In particular, we provide a significant amount of information on the design, operations and behavior of the two Pioneers during their entire missions, including descriptions of various data formats and techniques used for their navigation and radio-science data analysis. As most of this information was recovered relatively recently, it was not used in the previous studies of the Pioneer anomaly, but it is critical for the new investigation.
Figures

Similar articles
-
Support for temporally varying behavior of the Pioneer anomaly from the extended Pioneer 10 and 11 Doppler data sets.Phys Rev Lett. 2011 Aug 19;107(8):081103. doi: 10.1103/PhysRevLett.107.081103. Epub 2011 Aug 19. Phys Rev Lett. 2011. PMID: 21929157
-
Support for the thermal origin of the pioneer anomaly.Phys Rev Lett. 2012 Jun 15;108(24):241101. doi: 10.1103/PhysRevLett.108.241101. Epub 2012 Jun 12. Phys Rev Lett. 2012. PMID: 23004253
-
Low-Frequency Gravitational Wave Searches Using Spacecraft Doppler Tracking.Living Rev Relativ. 2006;9(1):1. doi: 10.12942/lrr-2006-1. Epub 2006 Jan 24. Living Rev Relativ. 2006. PMID: 28179872 Free PMC article. Review.
-
Preliminary Planning for Mars Sample Return (MSR) Curation Activities in a Sample Receiving Facility (SRF).Astrobiology. 2022 Jun;22(S1):S57-S80. doi: 10.1089/AST.2021.0105. Epub 2022 May 19. Astrobiology. 2022. PMID: 34904890 Review.
-
Laboratory test of Newton's second law for small accelerations.Phys Rev Lett. 2007 Apr 13;98(15):150801. doi: 10.1103/PhysRevLett.98.150801. Epub 2007 Apr 13. Phys Rev Lett. 2007. PMID: 17501332
Cited by
-
The Confrontation between General Relativity and Experiment.Living Rev Relativ. 2014;17(1):4. doi: 10.12942/lrr-2014-4. Epub 2014 Jun 11. Living Rev Relativ. 2014. PMID: 28179848 Free PMC article. Review.
References
-
- Abelson RD, Balint TS, Marshall KE, Noravian H, Randolph JE, Satter CM, Schmidt GR, Shirley JH. Enabling Exploration with Small Radioisotope Power Systems. Pasadena, CA: JPL; 2004.
-
- Acker RM. Pioneer F/G Feed Movement Mechanism. In: Herzl GG, editor. 6th Aerospace Mechanisms Symposium; Washington, DC: NASA; 1972. pp. 21–26.
-
- Acton CH. Ancillary data services of NASA’s Navigation and Ancillary Information Facility. Planet. Space Sci. 1996;44:65–70. doi: 10.1016/0032-0633(95)00107-7. - DOI
-
- Adamski TP. Pioneer Mission Support. Pasadena, CA: JPL; 1976. pp. 42–35.
Publication types
LinkOut - more resources
Full Text Sources
Research Materials