

Wind and water tunnel testing of a morphing aquatic micro air vehicle
- PMID: 28163877
- PMCID: PMC5206604
- DOI: 10.1098/rsfs.2016.0085
Wind and water tunnel testing of a morphing aquatic micro air vehicle
Abstract
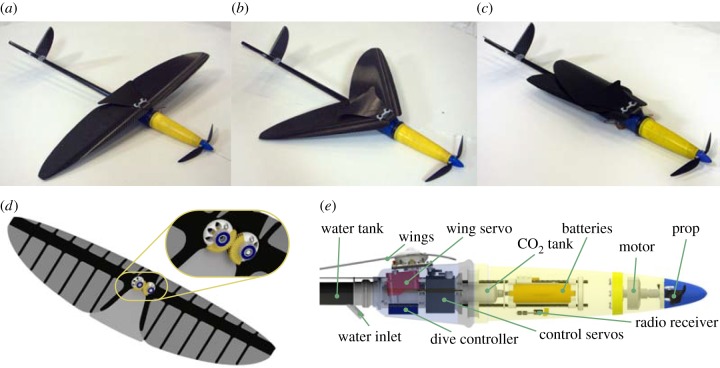
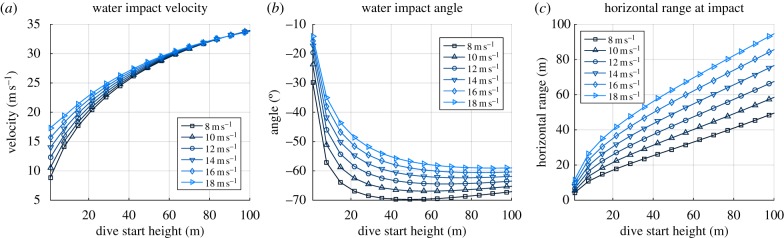
Aerial robots capable of locomotion in both air and water would enable novel mission profiles in complex environments, such as water sampling after floods or underwater structural inspections. The design of such a vehicle is challenging because it implies significant propulsive and structural design trade-offs for operation in both fluids. In this paper, we present a unique Aquatic Micro Air Vehicle (AquaMAV), which uses a reconfigurable wing to dive into the water from flight, inspired by the plunge diving strategy of water diving birds in the family Sulidae. The vehicle's performance is investigated in wind and water tunnel experiments, from which we develop a planar trajectory model. This model is used to predict the dive behaviour of the AquaMAV, and investigate the efficacy of passive dives initiated by wing folding as a means of water entry. The paper also includes first field tests of the AquaMAV prototype where the folding wings are used to initiate a plunge dive.
Keywords: aerial–aquatic locomotion; multimodal mobility; wing morphing.
Figures










 the robot-fixed reference frame, with its origin at the vehicle nose
the robot-fixed reference frame, with its origin at the vehicle nose  and illustrating the definition of body angle of attack, αcg, pitch angle θ and velocity angle with respect to the earth-fixed frame, βcg. Also pictured are the wing and tail aerodynamic forces (Lw, Dw and Lf, Df, respectively), the robot weight
and illustrating the definition of body angle of attack, αcg, pitch angle θ and velocity angle with respect to the earth-fixed frame, βcg. Also pictured are the wing and tail aerodynamic forces (Lw, Dw and Lf, Df, respectively), the robot weight  and buoyancy B.
and buoyancy B.



References
-
- Ropert-Coudert Y, Grémillet D, Ryan P, Kato A, Naito Y, Le Maho Y. 2004. Between air and water: the plunge dive of the Cape gannet Morus capensis. Ibis 146, 281–290. ( 10.1111/j.1474-919x.2003.00250.x) - DOI
-
- Shkurti F, et al. 2012. Multi-domain monitoring of marine environments using a heterogeneous robot team. In 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), pp. 1747–1753. New York, NY: IEEE.
-
- Murphy RR, Steimle E, Lindemuth M, Trejo D, Hall M, Slocum D, Hurlebaus S, Medina-Cetina Z et al. 2009. Robot-assisted bridge inspection after Hurricane Ike. In 2009 IEEE Int. Workshop on Safety, Security and Rescue Robotics (SSRR), pp. 1–5. New York, NY: IEEE.
LinkOut - more resources
Full Text Sources
Other Literature Sources