

Touchdown to take-off: at the interface of flight and surface locomotion
- PMID: 28163884
- PMCID: PMC5206611
- DOI: 10.1098/rsfs.2016.0094
Touchdown to take-off: at the interface of flight and surface locomotion
Abstract
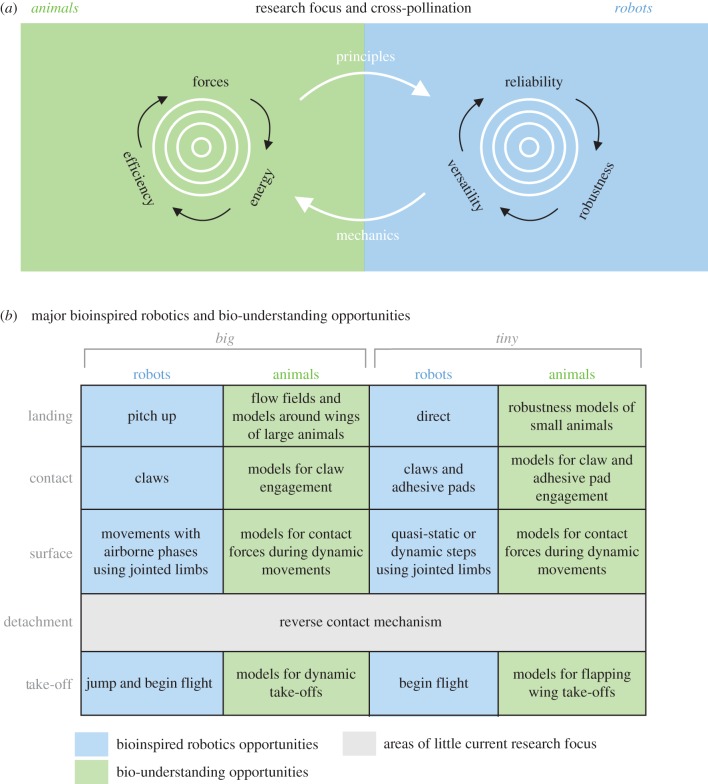
Small aerial robots are limited to short mission times because aerodynamic and energy conversion efficiency diminish with scale. One way to extend mission times is to perch, as biological flyers do. Beyond perching, small robot flyers benefit from manoeuvring on surfaces for a diverse set of tasks, including exploration, inspection and collection of samples. These opportunities have prompted an interest in bimodal aerial and surface locomotion on both engineered and natural surfaces. To accomplish such novel robot behaviours, recent efforts have included advancing our understanding of the aerodynamics of surface approach and take-off, the contact dynamics of perching and attachment and making surface locomotion more efficient and robust. While current aerial robots show promise, flying animals, including insects, bats and birds, far surpass them in versatility, reliability and robustness. The maximal size of both perching animals and robots is limited by scaling laws for both adhesion and claw-based surface attachment. Biomechanists can use the current variety of specialized robots as inspiration for probing unknown aspects of bimodal animal locomotion. Similarly, the pitch-up landing manoeuvres and surface attachment techniques of animals can offer an evolutionary design guide for developing robots that perch on more diverse and complex surfaces.
Keywords: bimodal; bioinspired; biomimetics; flight; locomotion; surface.
Figures
References
-
- Alexander DE, Vogel S. 2004. Nature‘s flyers: birds, insects, and the biomechanics of flight Baltimore, MD: JHU Press.
-
- Crutsinger GM, Short J, Sollenberger R. 2016. The future of UAVs in ecology: an insider perspective from the Silicon Valley drone industry. J. Unmanned Veh. Syst. 4, 161–168. ( 10.1139/juvs-2016-0008) - DOI
-
- Bertin JJ, Cummings RM. 2014. Aerodynamics for engineers, 6th edn New York City, NY: Pearson.
-
- Tennekes H. 1997. The simple science of flight from insects to jumbo jets. Cambridge, MA: MIT Press.
-
- Leishman GJ. 2007. Principles of helicopter aerodynamics. Cambridge, UK: Cambridge University Press.
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources