

Vehicle Detection in Aerial Images Based on Region Convolutional Neural Networks and Hard Negative Example Mining
- PMID: 28208587
- PMCID: PMC5335960
- DOI: 10.3390/s17020336
Vehicle Detection in Aerial Images Based on Region Convolutional Neural Networks and Hard Negative Example Mining
Abstract
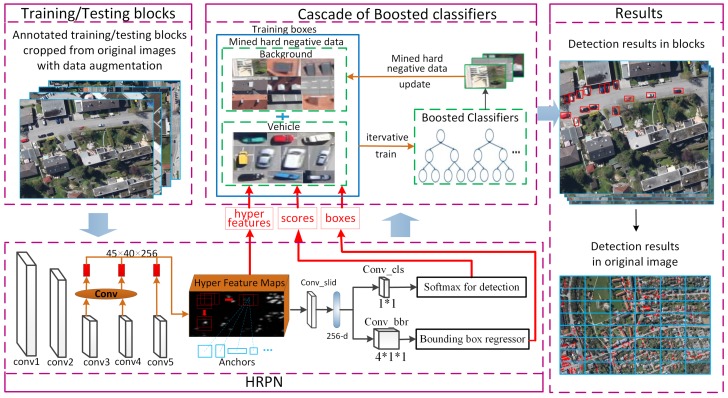
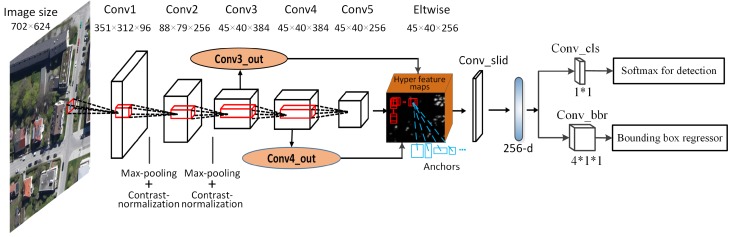
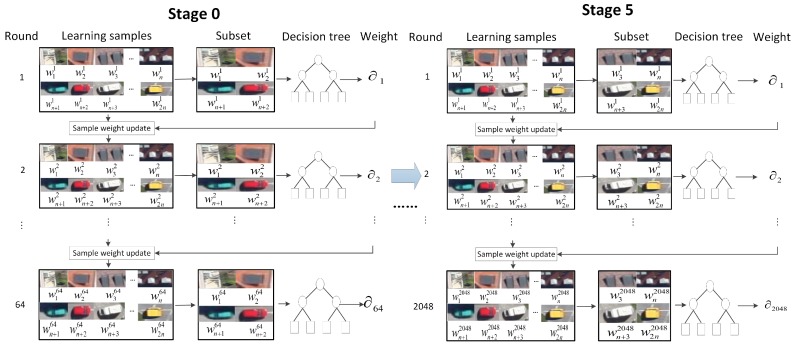
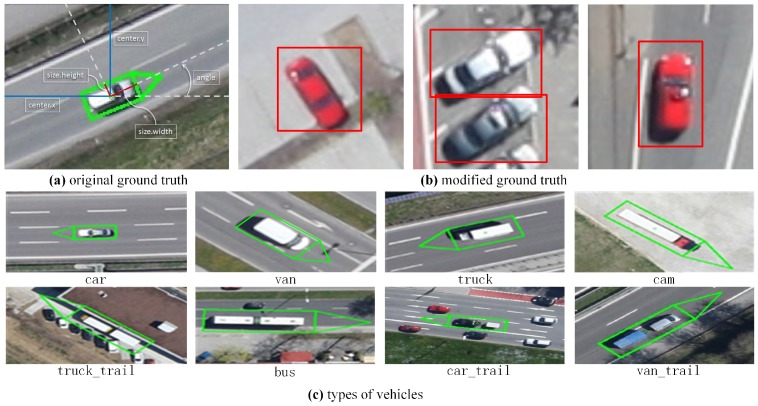
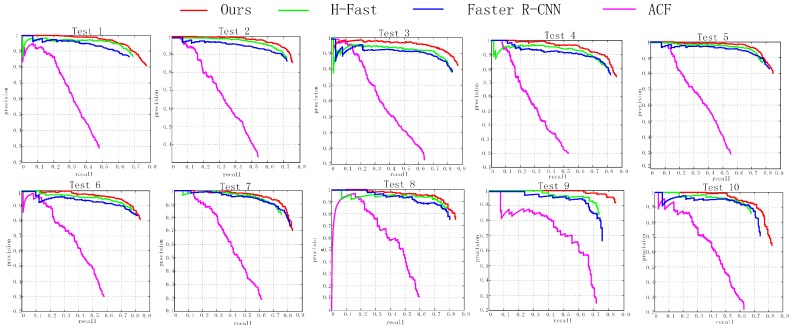
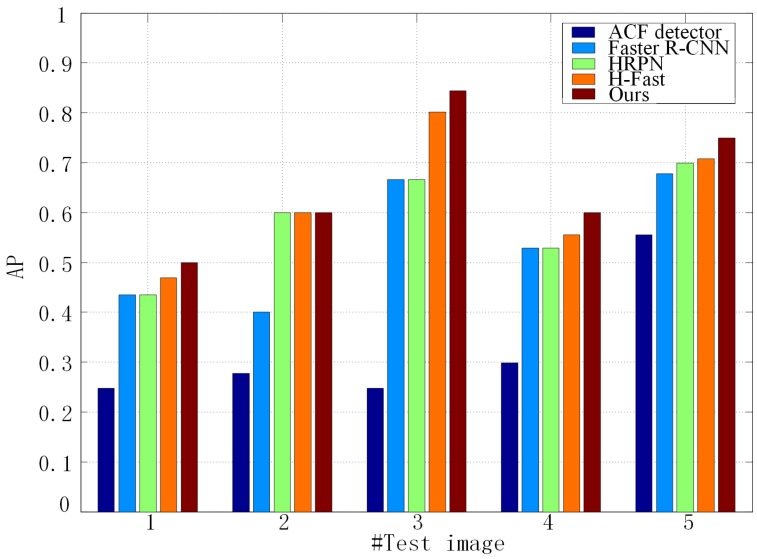
Detecting vehicles in aerial imagery plays an important role in a wide range of applications. The current vehicle detection methods are mostly based on sliding-window search and handcrafted or shallow-learning-based features, having limited description capability and heavy computational costs. Recently, due to the powerful feature representations, region convolutional neural networks (CNN) based detection methods have achieved state-of-the-art performance in computer vision, especially Faster R-CNN. However, directly using it for vehicle detection in aerial images has many limitations: (1) region proposal network (RPN) in Faster R-CNN has poor performance for accurately locating small-sized vehicles, due to the relatively coarse feature maps; and (2) the classifier after RPN cannot distinguish vehicles and complex backgrounds well. In this study, an improved detection method based on Faster R-CNN is proposed in order to accomplish the two challenges mentioned above. Firstly, to improve the recall, we employ a hyper region proposal network (HRPN) to extract vehicle-like targets with a combination of hierarchical feature maps. Then, we replace the classifier after RPN by a cascade of boosted classifiers to verify the candidate regions, aiming at reducing false detection by negative example mining. We evaluate our method on the Munich vehicle dataset and the collected vehicle dataset, with improvements in accuracy and robustness compared to existing methods.
Keywords: convolutional neural networks; hard negative example mining; hyper region proposal network; vehicle detection.
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- Leitloff J., Rosenbaum D., Kurz F., Meynberg O., Reinartz P. An Operational System for Estimating Road Traffic Information from Aerial Images. Remote Sens. 2014;6:11315–11341. doi: 10.3390/rs61111315. - DOI
-
- Liu K., Mattyus G. Fast Multiclass Vehicle Detection on Aerial Images. IEEE Geosci. Remote Sens. Lett. 2015;12:1–5.
-
- Moranduzzo T., Melgani F. Automatic Car Counting Method for Unmanned Aerial Vehicle Images. IEEE Trans. Geosci. Remote Sens. 2014;52:1635–1647. doi: 10.1109/TGRS.2013.2253108. - DOI
-
- Moranduzzo T., Melgani F. Detecting Cars in UAV Images With a Catalog-Based Approach. IEEE Trans. Geosci. Remote Sens. 2014;52:6356–6367. doi: 10.1109/TGRS.2013.2296351. - DOI
-
- Chen Z., Wang C., Luo H., Wang H. Vehicle Detection in High-Resolution Aerial Images Based on Fast Sparse Representation Classification and Multiorder Feature. IEEE Trans. Intell. Transp. Syst. 2016;17:2296–2309. doi: 10.1109/TITS.2016.2517826. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
