

Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring
- PMID: 28245587
- PMCID: PMC5375746
- DOI: 10.3390/s17030460
Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring
Abstract
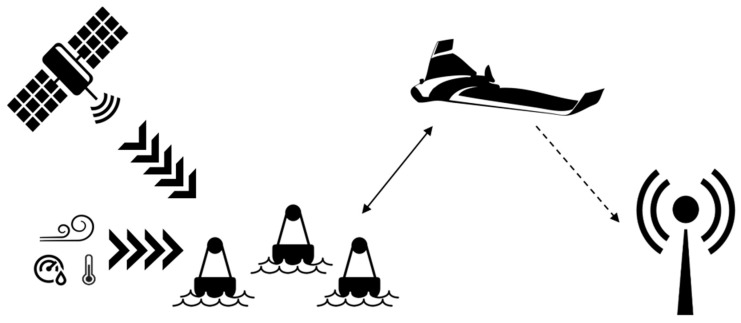
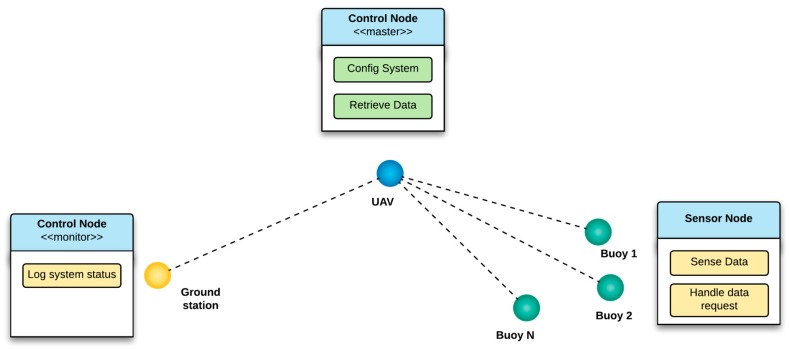
Marine environments are delicate ecosystems which directly influence local climates, flora, fauna, and human activities. Their monitorization plays a key role in their preservation, which is most commonly done through the use of environmental sensing buoy networks. These devices transmit data by means of satellite communications or close-range base stations, which present several limitations and elevated infrastructure costs. Unmanned Aerial Vehicles (UAV) are another alternative for remote environmental monitoring which provide new types of data and ease of use. These aircraft are mainly used in video capture related applications, in its various light spectrums, and do not provide the same data as sensing buoys, nor can they be used for such extended periods of time. The aim of this research is to provide a flexible, easy to deploy and cost-effective Wireless Sensor Network (WSN) for monitoring marine environments. This proposal uses a UAV as a mobile data collector, low-power long-range communications and sensing buoys as part of a single WSN. A complete description of the design, development, and implementation of the various parts of this system is presented, as well as its validation in a real-world scenario.
Keywords: LPWAN; LoRa; UAV; WSN; low power electronics; marine monitoring; remote sensing.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Molina-Pico A., Cuesta-Frau D., Araujo A., Alejandre J., Rozas A. Forest Monitoring and Wildland Early Fire Detection by a Hierarchical Wireless Sensor Network. J. Sens. 2016;2016:8325845. doi: 10.1155/2016/8325845. - DOI
-
- Aslan Y.E., Korpeoglu I., Ulusoy Ö. A framework for use of wireless sensor networks in forest fire detection and monitoring. Comput. Environ. Urban Syst. 2012;36:614–625. doi: 10.1016/j.compenvurbsys.2012.03.002. - DOI
-
- Nakagawa K., Kobayashi H., Sezaki K. Carrier Pigeon-Like Sensing System: Animal-Computer Interface Design for Opportunistic Data Exchange Interaction for a Wildlife Monitoring Application; Proceedings of the 5th Augmented Human International Conference on—AH’14; Kobe, Japan. 7–9 March 2014; pp. 1–2.
-
- Dyo V., Yousef K., Ellwood S.A., Macdonald D.W., Markham A., Trigoni N., Wohlers R., Mascolo C., Pásztor B., Scellato S. WILDSENSING: Design and deployment of a sustainable sensor network for wildlife monitoring. ACM Trans. Sens. Netw. 2012;8:1–33. doi: 10.1145/2240116.2240118. - DOI
-
- Karim L., Anpalagan A., Nasser N., Almhana J. Sensor-based M2M Agriculture Monitoring Systems for Developing Countries: State and Challenges. Netw. Protoc. Algorithms. 2013;5:68–86. doi: 10.5296/npa.v5i3.3787. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
