

Controllability and observability in complex networks - the effect of connection types
- PMID: 28273948
- PMCID: PMC5427891
- DOI: 10.1038/s41598-017-00160-5
Controllability and observability in complex networks - the effect of connection types
Abstract
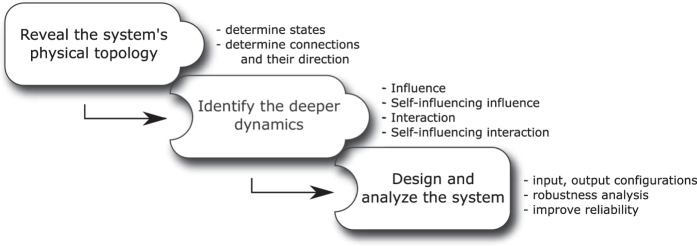
Network theory based controllability and observability analysis have become widely used techniques. We realized that most applications are not related to dynamical systems, and mainly the physical topologies of the systems are analysed without deeper considerations. Here, we draw attention to the importance of dynamics inside and between state variables by adding functional relationship defined edges to the original topology. The resulting networks differ from physical topologies of the systems and describe more accurately the dynamics of the conservation of mass, momentum and energy. We define the typical connection types and highlight how the reinterpreted topologies change the number of the necessary sensors and actuators in benchmark networks widely studied in the literature. Additionally, we offer a workflow for network science-based dynamical system analysis, and we also introduce a method for generating the minimum number of necessary actuator and sensor points in the system.
Conflict of interest statement
The authors declare no competing financial interests.
Figures









References
-
- Yan G, et al. Spectrum of controlling and observing complex networks. Nature Physics. 2015;11:779–786. doi: 10.1038/nphys3422. - DOI
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
