

Magnetically controlled ferromagnetic swimmers
- PMID: 28276490
- PMCID: PMC5343437
- DOI: 10.1038/srep44142
Magnetically controlled ferromagnetic swimmers
Abstract
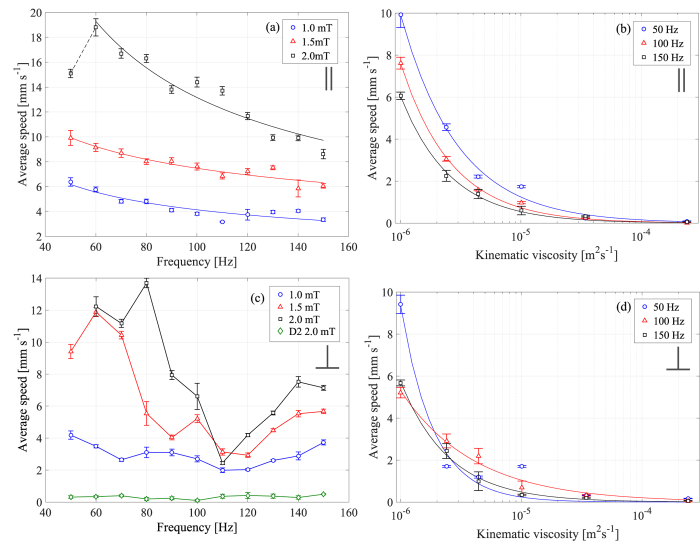
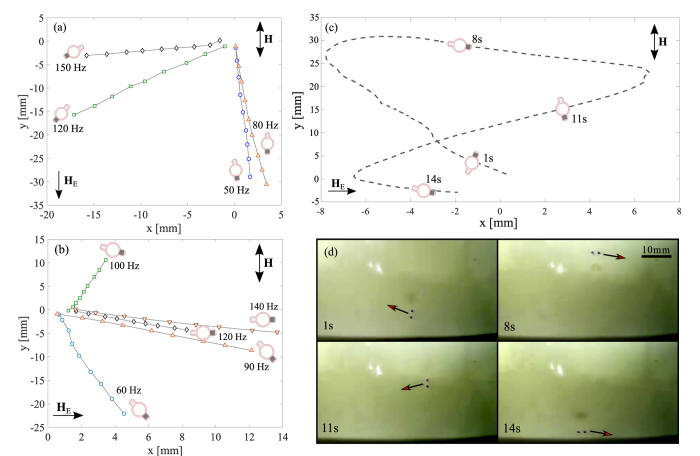
Microscopic swimming devices hold promise for radically new applications in lab-on-a-chip and microfluidic technology, diagnostics and drug delivery etc. In this paper, we demonstrate the experimental verification of a new class of autonomous ferromagnetic swimming devices, actuated and controlled solely by an oscillating magnetic field. These devices are based on a pair of interacting ferromagnetic particles of different size and different anisotropic properties joined by an elastic link and actuated by an external time-dependent magnetic field. The net motion is generated through a combination of dipolar interparticle gradient forces, time-dependent torque and hydrodynamic coupling. We investigate the dynamic performance of a prototype (3.6 mm) of the ferromagnetic swimmer in fluids of different viscosity as a function of the external field parameters (frequency and amplitude) and demonstrate stable propulsion over a wide range of Reynolds numbers. We show that the direction of swimming has a dependence on both the frequency and amplitude of the applied external magnetic field, resulting in robust control over the speed and direction of propulsion. This paves the way to fabricating microscale devices for a variety of technological applications requiring reliable actuation and high degree of control.
Conflict of interest statement
The authors declare no competing financial interests.
Figures

References
-
- Purcell E. M. Life at low Reynolds number. Am. J. Phys. 45, 3–11 (1977).
-
- Shapere A. & Wilczek F. Geometry of self-propulsion at low Reynolds number. J. Fluid Mech. 198, 557 (1989).
-
- Lauga E. & Powers T. R. The hydrodynamics of swimming microorganisms. Reports Prog. Phys. 72, 96601 (2009).
-
- Najafi A. & Golestanian R. Simple swimmer at low Reynolds number: Three linked spheres. Phys. Rev. E - Stat. Nonlinear, Soft Matter Phys. 69 (2004). - PubMed
-
- Najafi A. & Zargar R. Two-sphere low-Reynolds-number propeller. Phys. Rev. E - Stat. Nonlinear, Soft Matter Phys. 81, 1–4 (2010). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
