

Towards a comprehensive framework for movement and distortion correction of diffusion MR images: Within volume movement
- PMID: 28284799
- PMCID: PMC5445723
- DOI: 10.1016/j.neuroimage.2017.02.085
Towards a comprehensive framework for movement and distortion correction of diffusion MR images: Within volume movement
Abstract
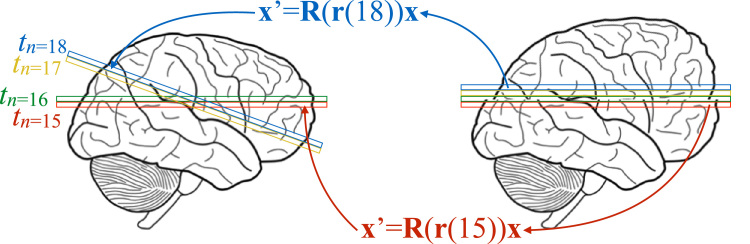
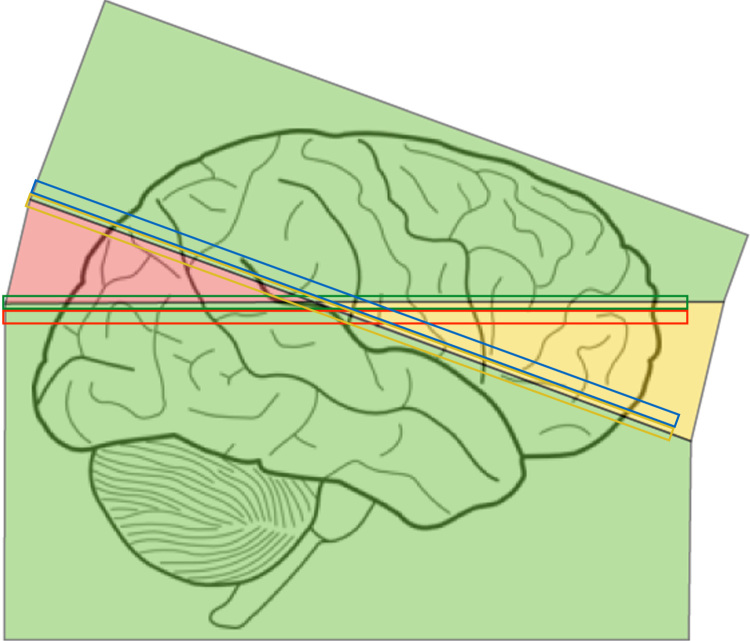
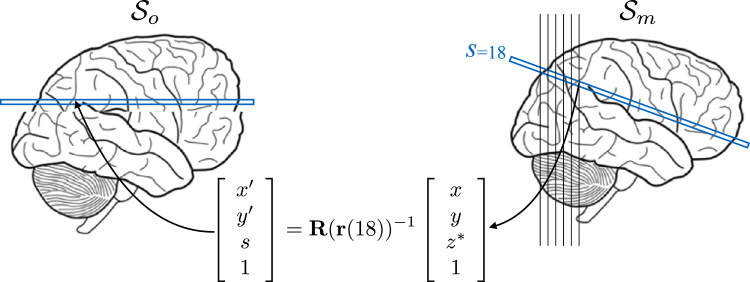
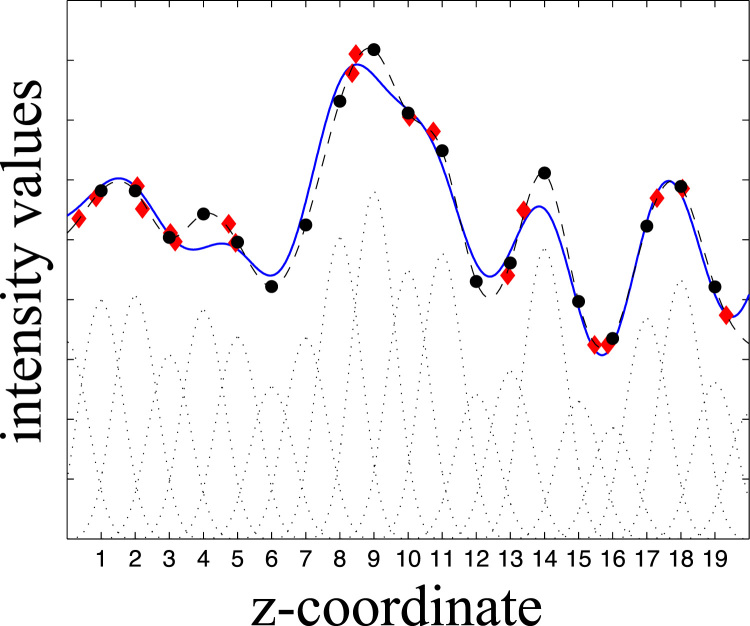
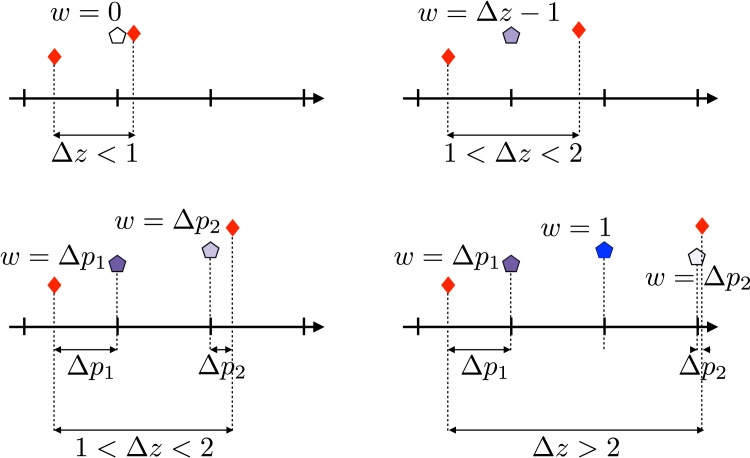
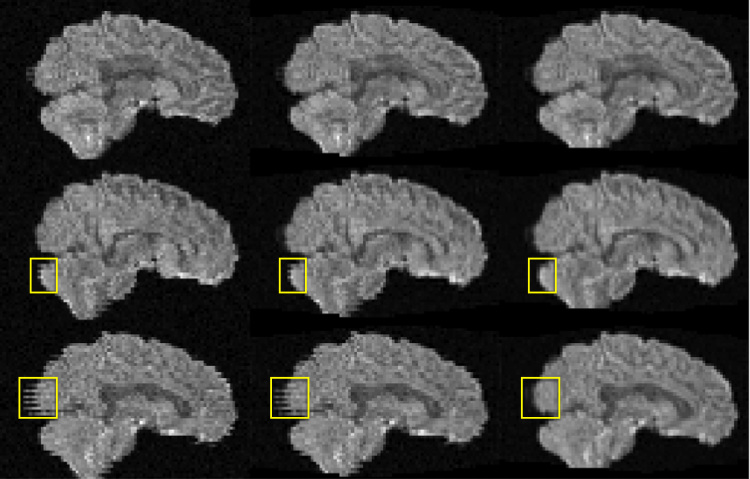
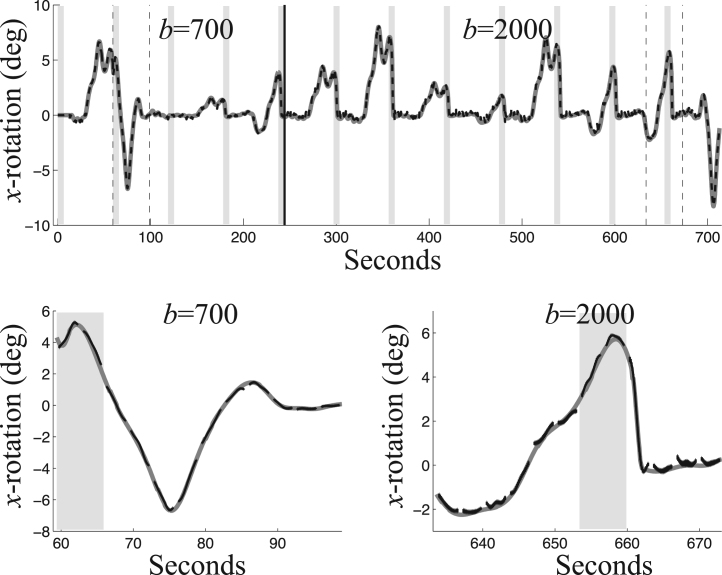
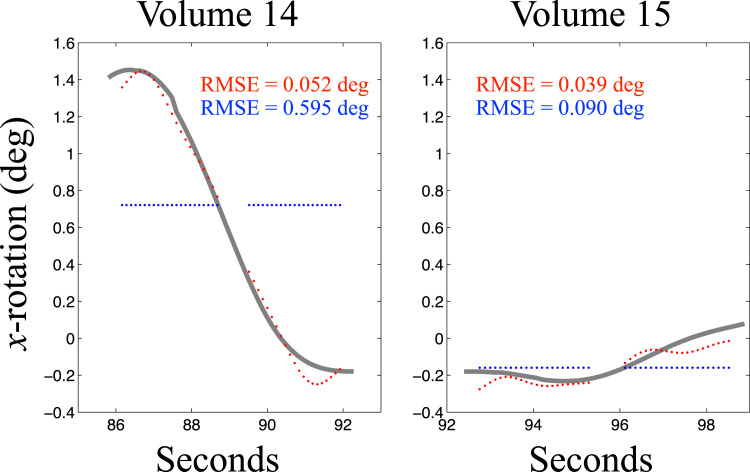
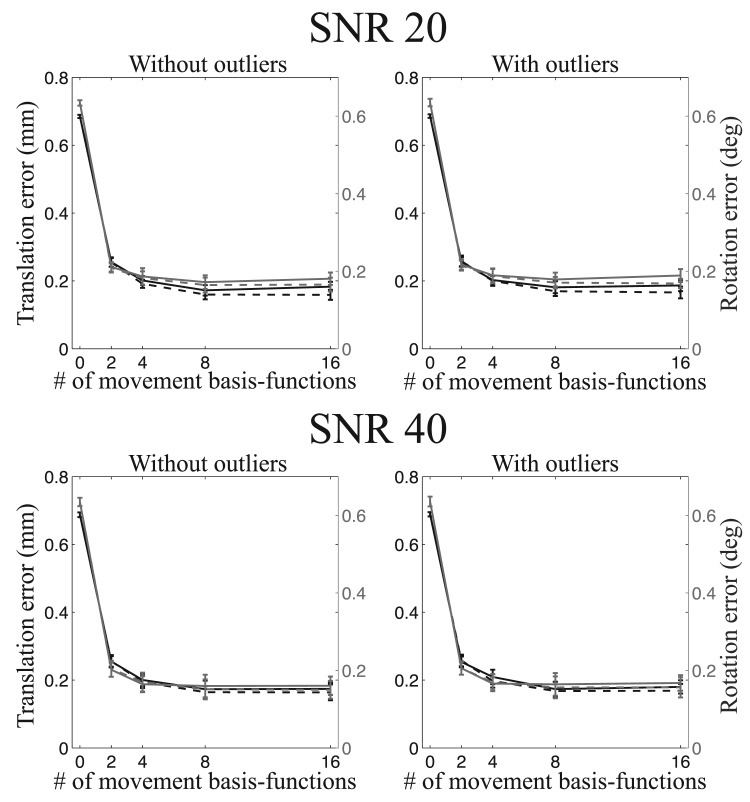
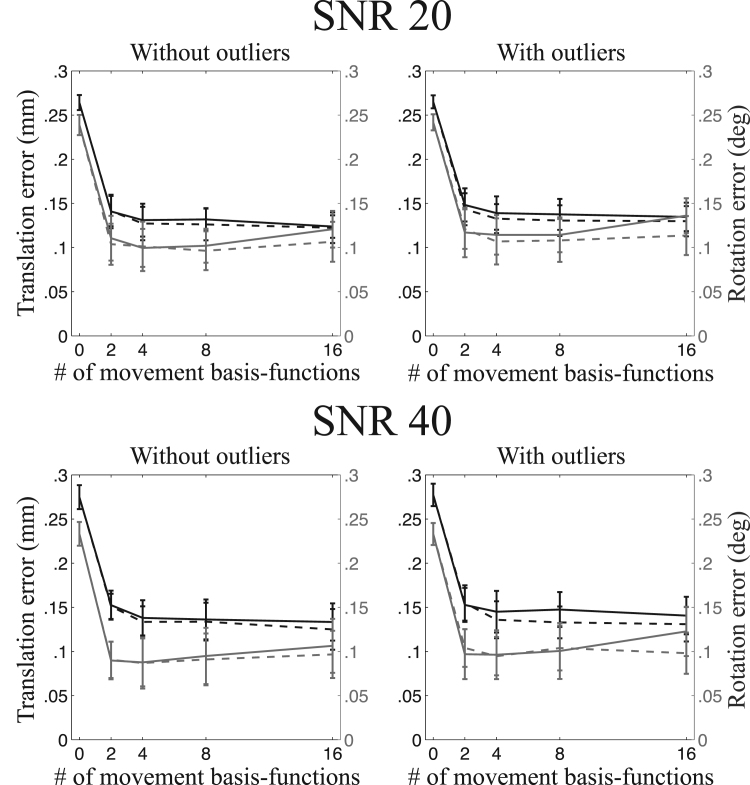
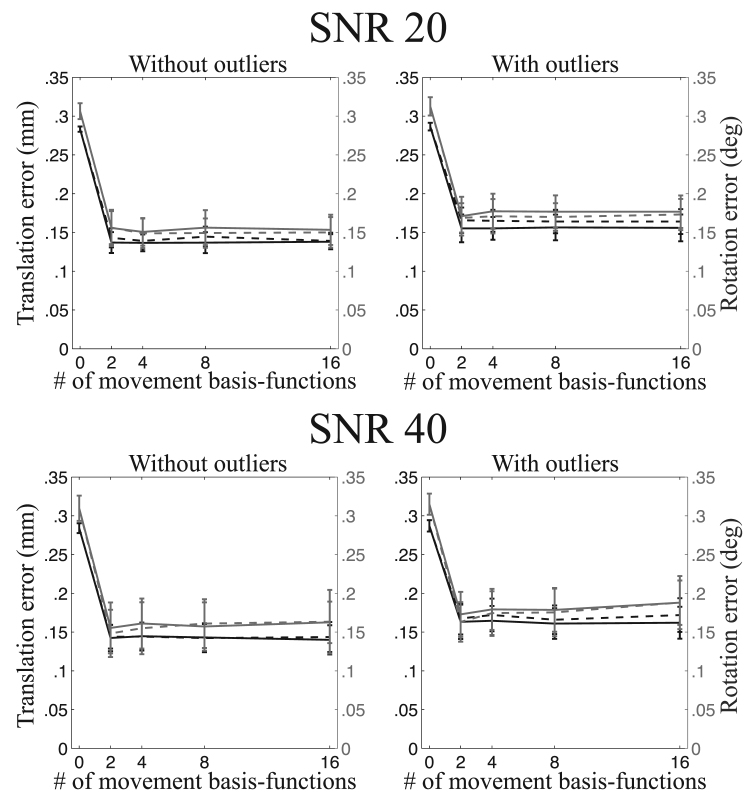
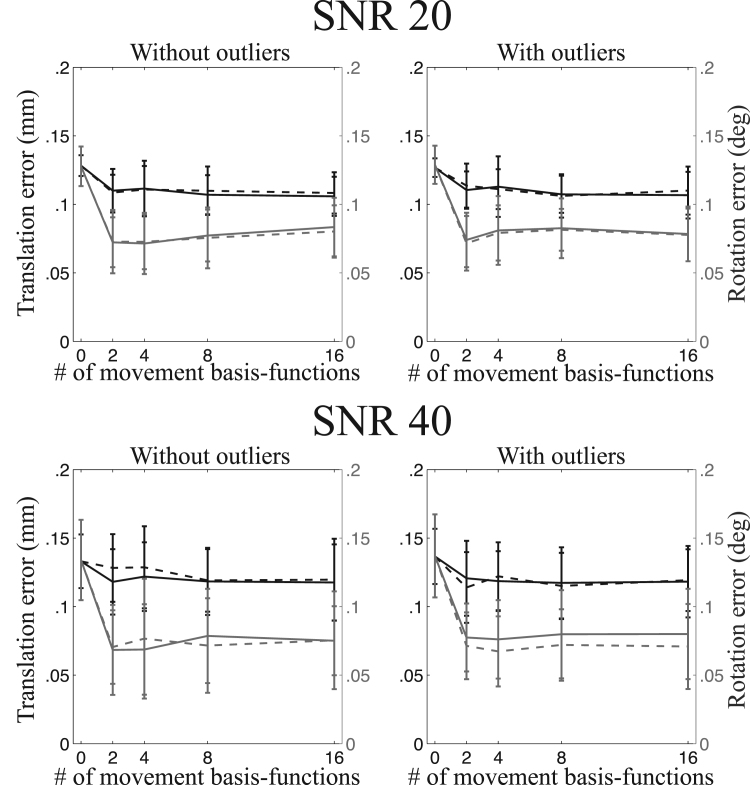
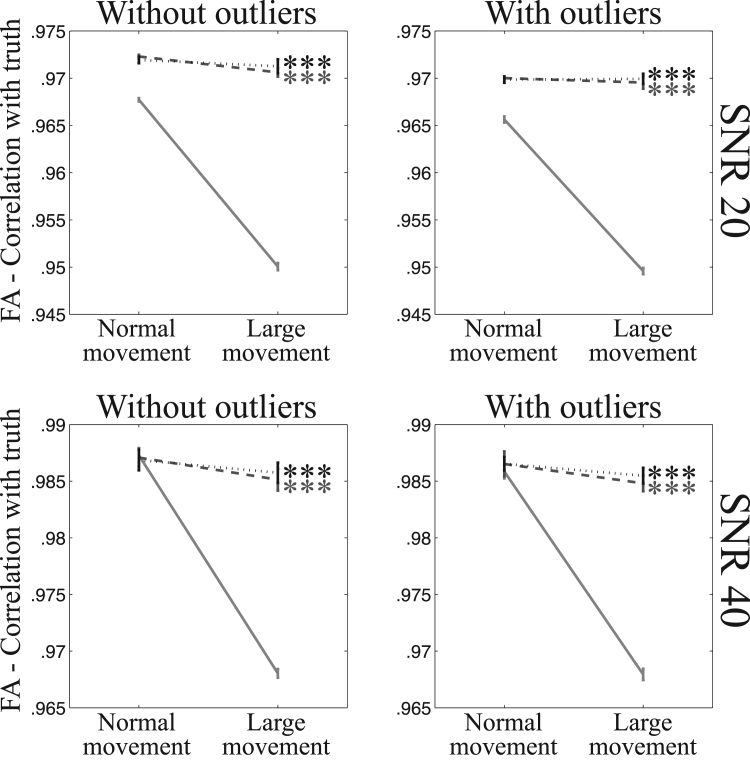
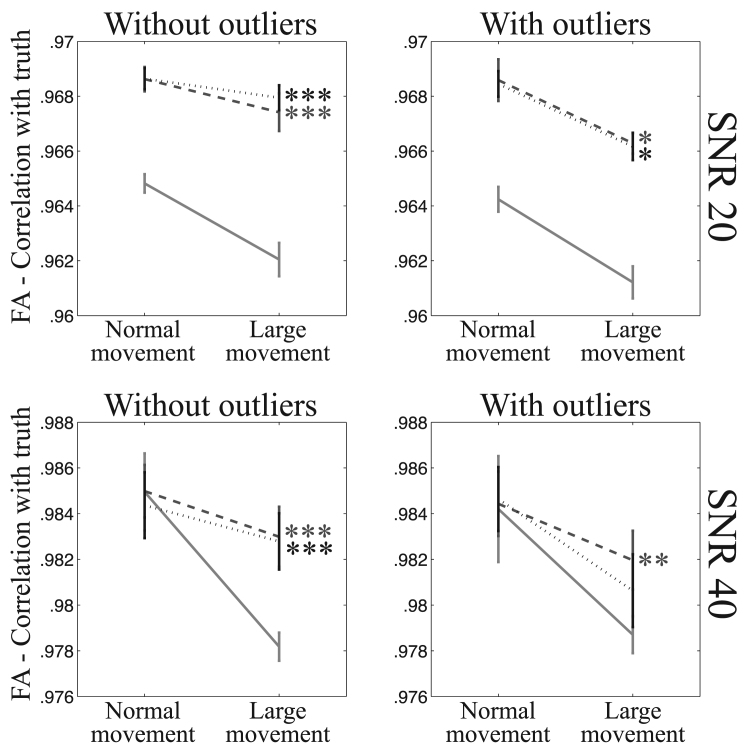
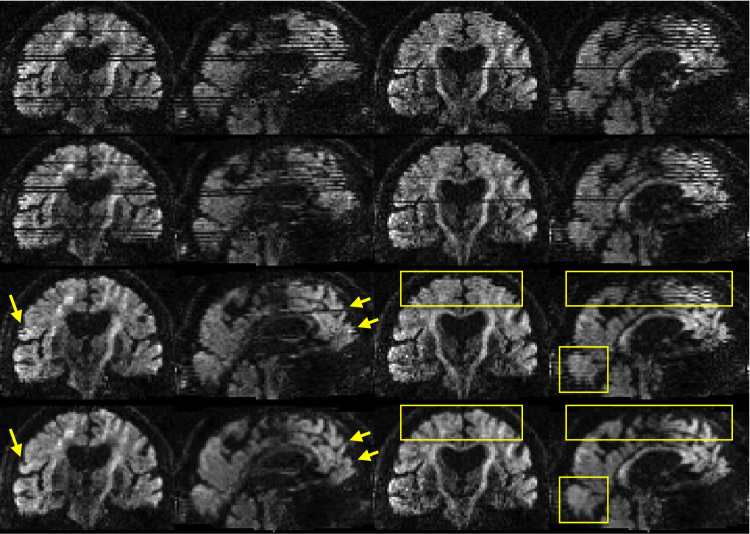
Most motion correction methods work by aligning a set of volumes together, or to a volume that represents a reference location. These are based on an implicit assumption that the subject remains motionless during the several seconds it takes to acquire all slices in a volume, and that any movement occurs in the brief moment between acquiring the last slice of one volume and the first slice of the next. This is clearly an approximation that can be more or less good depending on how long it takes to acquire one volume and in how rapidly the subject moves. In this paper we present a method that increases the temporal resolution of the motion correction by modelling movement as a piecewise continous function over time. This intra-volume movement correction is implemented within a previously presented framework that simultaneously estimates distortions, movement and movement-induced signal dropout. We validate the method on highly realistic simulated data containing all of these effects. It is demonstrated that we can estimate the true movement with high accuracy, and that scalar parameters derived from the data, such as fractional anisotropy, are estimated with greater fidelity when data has been corrected for intra-volume movement. Importantly, we also show that the difference in fidelity between data affected by different amounts of movement is much reduced when taking intra-volume movement into account. Additional validation was performed on data from a healthy volunteer scanned when lying still and when performing deliberate movements. We show an increased correspondence between the "still" and the "movement" data when the latter is corrected for intra-volume movement. Finally we demonstrate a big reduction in the telltale signs of intra-volume movement in data acquired on elderly subjects.
Keywords: Diffusion; Interpolation; Movement; Registration; Slice-to-volume.
Copyright © 2017 The Authors. Published by Elsevier Inc. All rights reserved.
Figures
References
-
- Andersson J.L.R., Skare S., Ashburner J. How to correct susceptibility distortions in spin-echo echo-planar images: application to diffusion tensor imaging. NeuroImage. 2003;20:870–888. - PubMed
-
- Andersson J.L.R., Graham M.S., Zsoldos E., Sotiropoulos S.N. Incorporating outlier detection and replacement into a non-parametric framework for movement and distortion correction of diffusion MR images. NeuroImage. 2016;141:556–572. - PubMed
-
- Bannister P.R., Brady J.M., Jenkinson M. Integrating temporal information with a non-rigid method of motion correction for functional magnetic resonance images. Magn. Reson. Med. 2007;25:311–320.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
