

Closed Loop Control of a Tethered Magnetic Capsule Endoscope
- PMID: 28286886
- PMCID: PMC5345944
- DOI: 10.15607/RSS.2016.XII.018
Closed Loop Control of a Tethered Magnetic Capsule Endoscope
Abstract
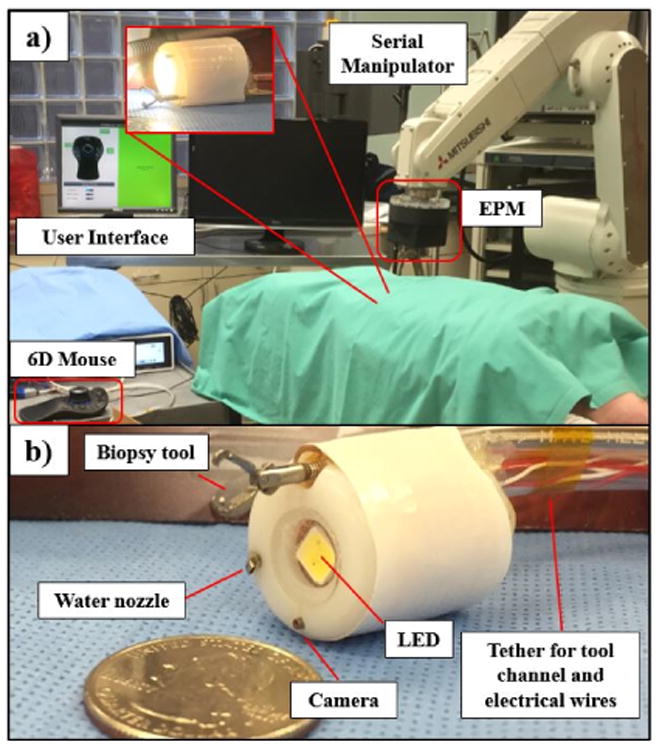
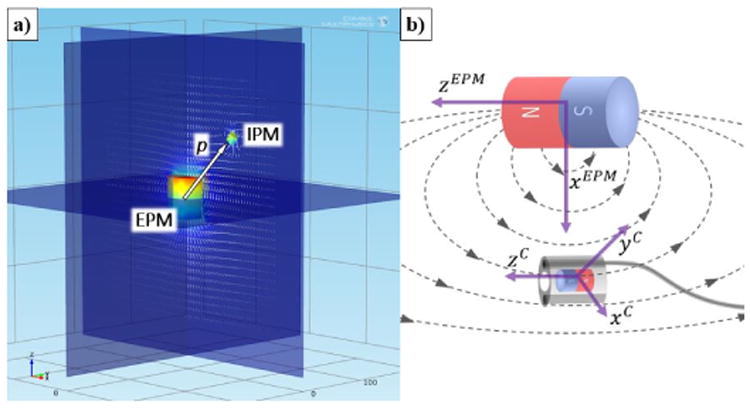
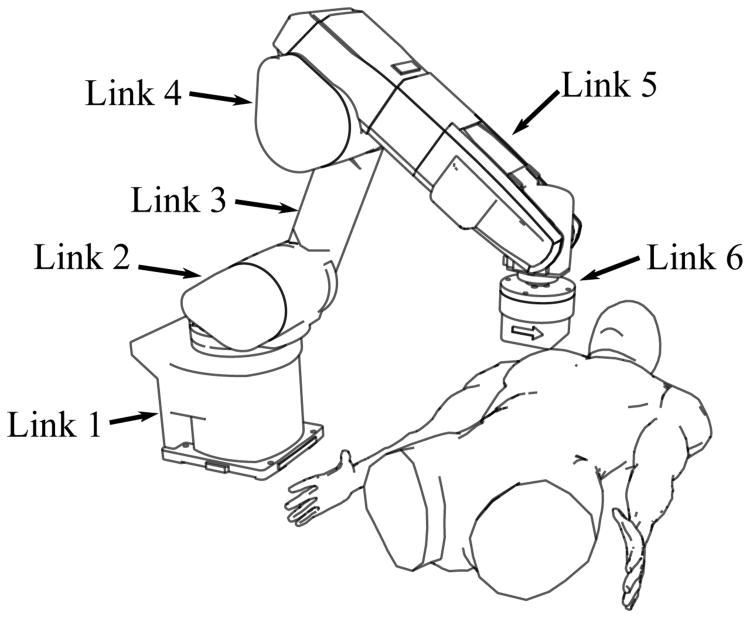
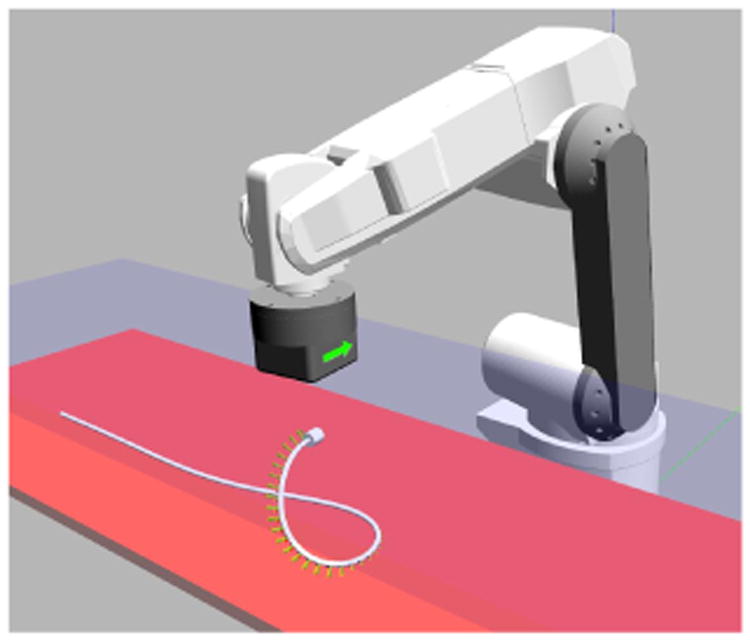
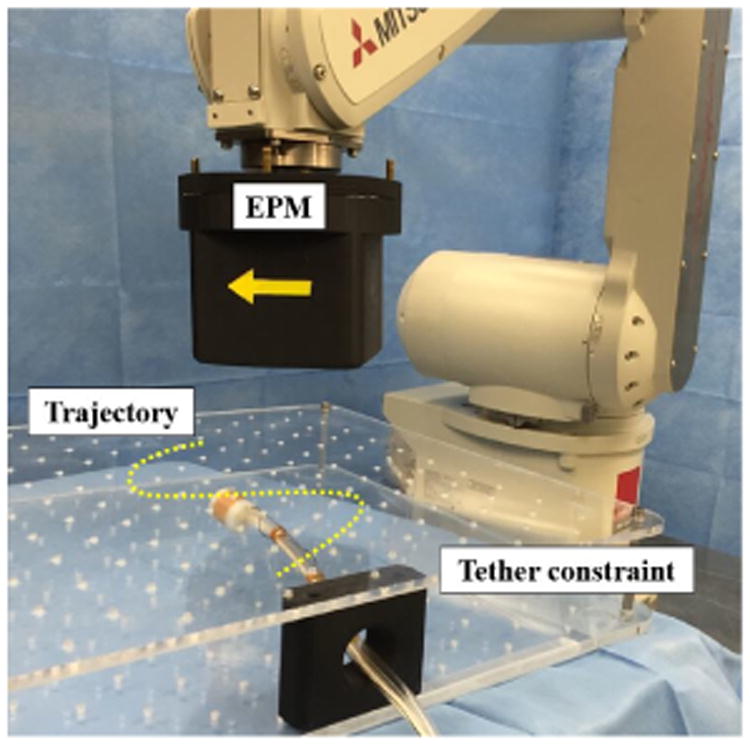
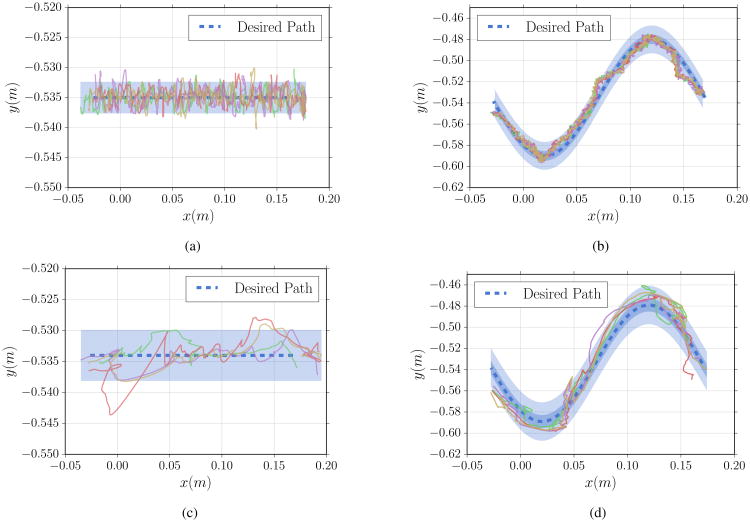
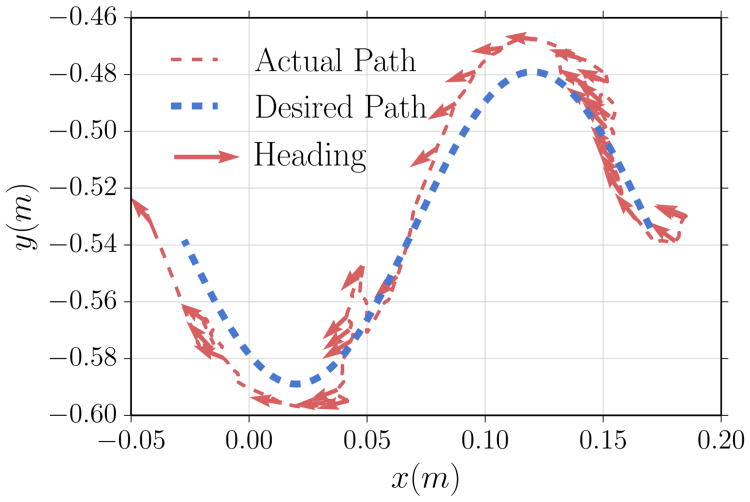
Magnetic field gradients have repeatedly been shown to be the most feasible mechanism for gastrointestinal capsule endoscope actuation. An inverse quartic magnetic force variation with distance results in large force gradients induced by small movements of a driving magnet; this necessitates robotic actuation of magnets to implement stable control of the device. A typical system consists of a serial robot with a permanent magnet at its end effector that actuates a capsule with an embedded permanent magnet. We present a tethered capsule system where a capsule with an embedded magnet is closed loop controlled in 2 degree-of-freedom in position and 2 degree-of-freedom in orientation. Capitalizing on the magnetic field of the external driving permanent magnet, the capsule is localized in 6-D allowing for both position and orientation feedback to be used in a control scheme. We developed a relationship between the serial robot's joint parameters and the magnetic force and torque that is exerted onto the capsule. Our methodology was validated both in a dynamic simulation environment where a custom plug-in for magnetic interaction was written, as well as on an experimental platform. The tethered capsule was demonstrated to follow desired trajectories in both position and orientation with accuracy that is acceptable for colonoscopy.
Figures
Similar articles
-
Nonholonomic Closed-loop Velocity Control of a Soft-tethered Magnetic Capsule Endoscope.Rep U S. 2016 Oct;2016:1139-1144. doi: 10.1109/IROS.2016.7759192. Epub 2016 Dec 1. Rep U S. 2016. PMID: 28316873 Free PMC article.
-
SCMAS: an IMU-based 6-DOF closed-loop permanent magnet actuation system for magnet agent.Sci Rep. 2025 May 22;15(1):17808. doi: 10.1038/s41598-025-00320-y. Sci Rep. 2025. PMID: 40404744 Free PMC article.
-
Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated With a Single Permanent Magnet: A Dynamic Control Approach.IEEE Robot Autom Lett. 2019 Apr;4(2):1224-1231. doi: 10.1109/LRA.2019.2894907. Epub 2019 Jan 23. IEEE Robot Autom Lett. 2019. PMID: 31304240 Free PMC article.
-
Robotic-Assisted Colonoscopy Platform with a Magnetically-Actuated Soft-Tethered Capsule.Cancers (Basel). 2020 Sep 2;12(9):2485. doi: 10.3390/cancers12092485. Cancers (Basel). 2020. PMID: 32887238 Free PMC article.
-
Endoluminal Motion Recognition of a Magnetically-Guided Capsule Endoscope Based on Capsule-Tissue Interaction Force.Sensors (Basel). 2021 Mar 30;21(7):2395. doi: 10.3390/s21072395. Sensors (Basel). 2021. PMID: 33808443 Free PMC article.
Cited by
-
Sensitivity Ellipsoids for Force Control of Magnetic Robots with Localization Uncertainty.IEEE Trans Robot. 2019 Oct;35(5):1123-1135. doi: 10.1109/TRO.2019.2917817. Epub 2019 Jun 11. IEEE Trans Robot. 2019. PMID: 31607833 Free PMC article.
-
Enhanced Real-Time Pose Estimation for Closed-Loop Robotic Manipulation of Magnetically Actuated Capsule Endoscopes.Int J Rob Res. 2018 Jul;37(8):890-911. doi: 10.1177/0278364918779132. Epub 2018 Jun 25. Int J Rob Res. 2018. PMID: 30150847 Free PMC article.
-
Nonholonomic Closed-loop Velocity Control of a Soft-tethered Magnetic Capsule Endoscope.Rep U S. 2016 Oct;2016:1139-1144. doi: 10.1109/IROS.2016.7759192. Epub 2016 Dec 1. Rep U S. 2016. PMID: 28316873 Free PMC article.
-
Sensorless Estimation of the Planar Distal Shape of a Tip-Actuated Endoscope.IEEE Robot Autom Lett. 2019 Oct;4(4):3371-3377. doi: 10.1109/LRA.2019.2926964. Epub 2019 Jul 4. IEEE Robot Autom Lett. 2019. PMID: 31341948 Free PMC article.
-
Intelligent magnetic manipulation for gastrointestinal ultrasound.Sci Robot. 2019 Jun 26;4(31):eaav7725. doi: 10.1126/scirobotics.aav7725. Epub 2019 Jun 19. Sci Robot. 2019. PMID: 31380501 Free PMC article.
References
-
- Alazmani A, Hood A, Jayne D, Neville A, Culmer P. Quantitative assessment of colorectal morphology: Implications for robotic colonoscopy. Medical Engineering & Physics. 2016 - PubMed
-
- Arezzo A, Menciassi A, Valdastri P, Ciuti G, Lucarini G, Salerno M, Di Natali C, Verra M, Dario P, Morino M. Experimental assessment of a novel robotically-driven endoscopic capsule compared to traditional colonoscopy. Digestive and Liver Disease. 2013;45(8):657–662. - PubMed
-
- Bao G, Pahlavan K, Mi L. Hybrid localization of microrobotic endoscopic capsule inside small intestine by data fusion of vision and rf sensors. IEEE Sensors Journal. 2015;15(5):2669–2678.
-
- Carpi F, Kastelein N, Talcott M, Pappone C. Magnetically controllable gastrointestinal steering of video capsules. IEEE Transactions on Biomedical Engineering. 2011;58(2):231–234. - PubMed
-
- Chan TF, Dubey RV. A weighted least-norm solution based scheme for avoiding joint limits for redundant joint manipulators. IEEE Transactions on Robotics and Automation. 1995;11(2):286–292.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources