

The Active Side of Stereopsis: Fixation Strategy and Adaptation to Natural Environments
- PMID: 28317909
- PMCID: PMC5357847
- DOI: 10.1038/srep44800
The Active Side of Stereopsis: Fixation Strategy and Adaptation to Natural Environments
Abstract
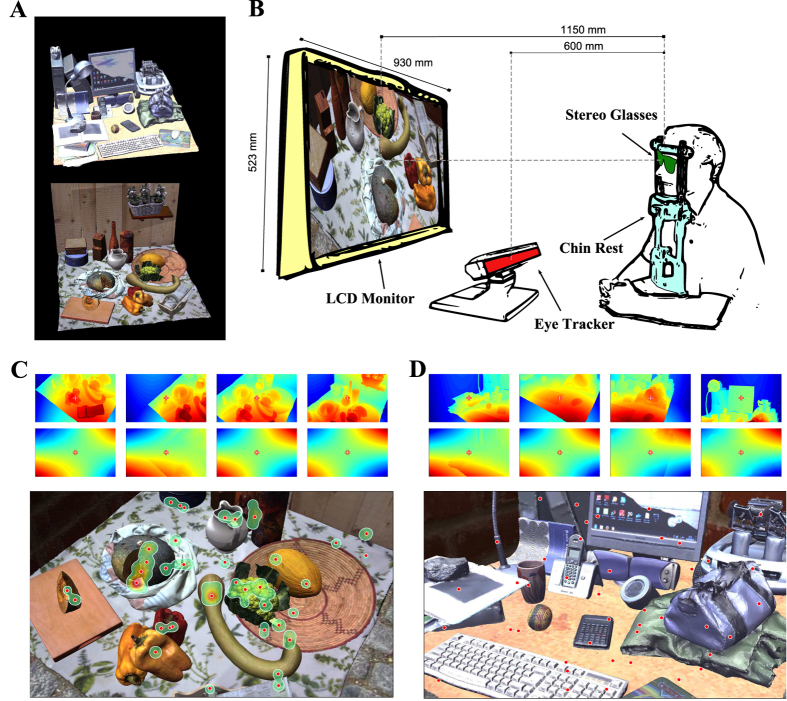
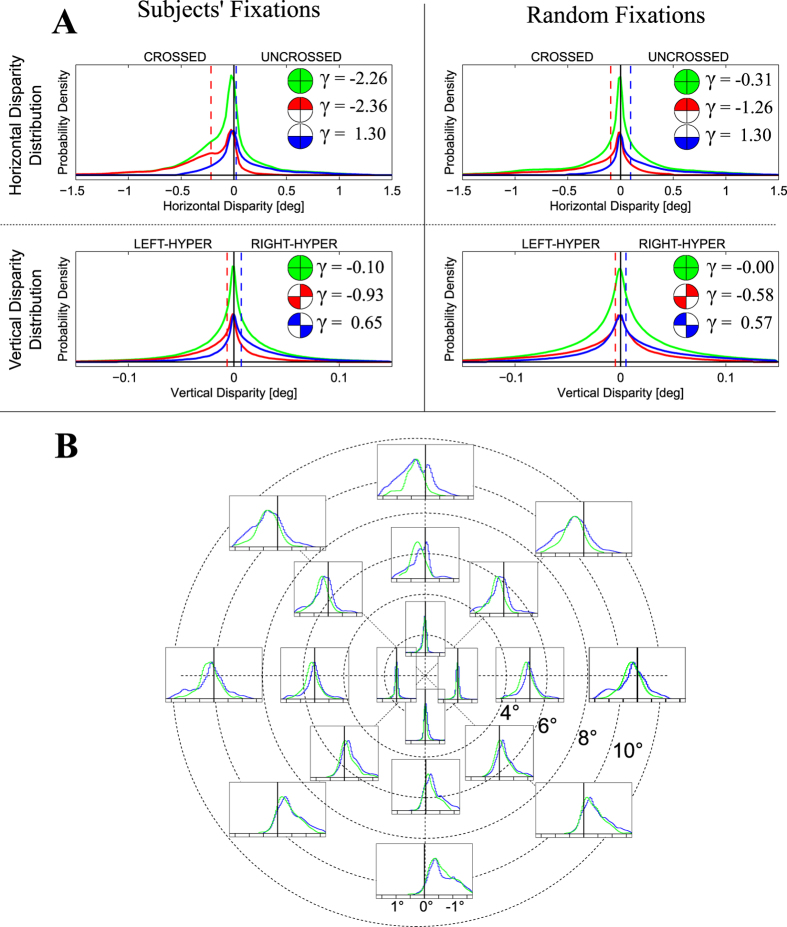
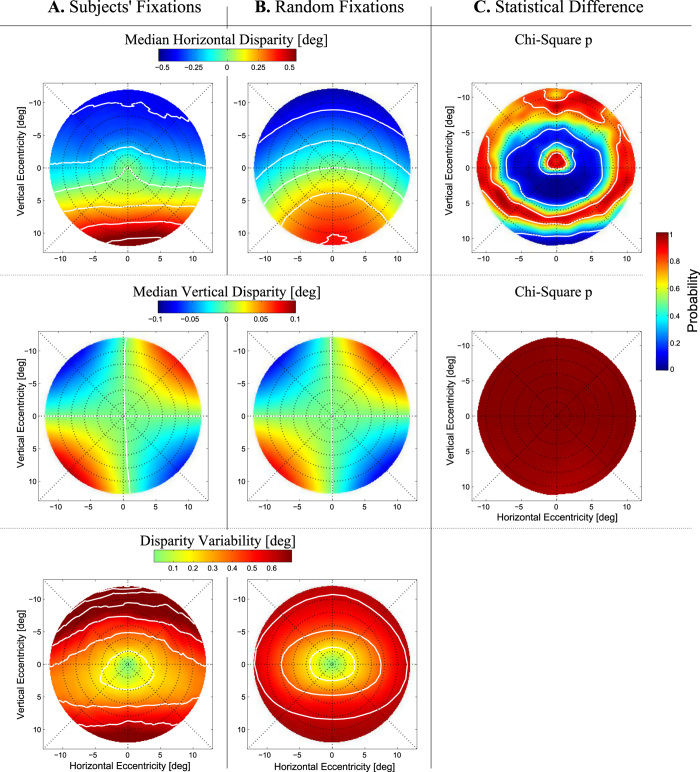
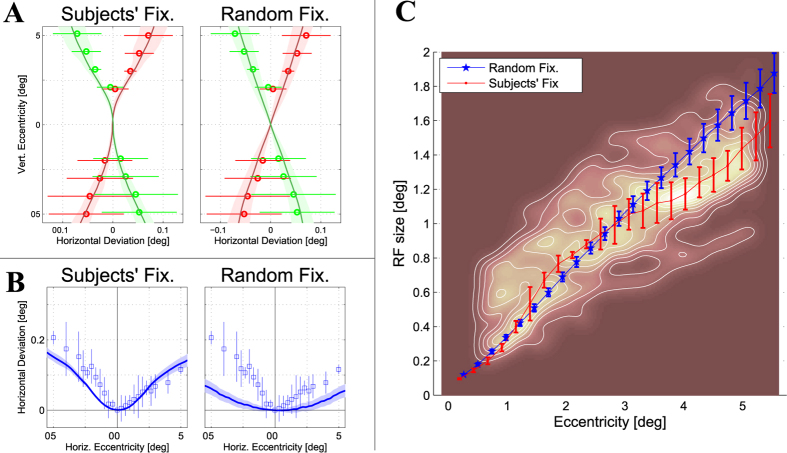
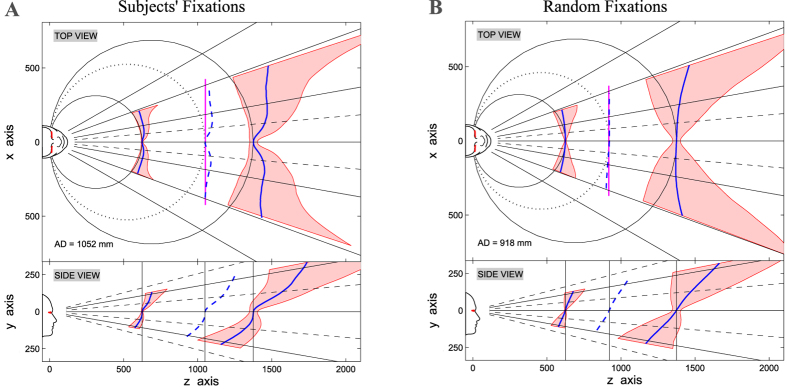
Depth perception in near viewing strongly relies on the interpretation of binocular retinal disparity to obtain stereopsis. Statistical regularities of retinal disparities have been claimed to greatly impact on the neural mechanisms that underlie binocular vision, both to facilitate perceptual decisions and to reduce computational load. In this paper, we designed a novel and unconventional approach in order to assess the role of fixation strategy in conditioning the statistics of retinal disparity. We integrated accurate realistic three-dimensional models of natural scenes with binocular eye movement recording, to obtain accurate ground-truth statistics of retinal disparity experienced by a subject in near viewing. Our results evidence how the organization of human binocular visual system is finely adapted to the disparity statistics characterizing actual fixations, thus revealing a novel role of the active fixation strategy over the binocular visual functionality. This suggests an ecological explanation for the intrinsic preference of stereopsis for a close central object surrounded by a far background, as an early binocular aspect of the figure-ground segregation process.
Conflict of interest statement
The authors declare no competing financial interests.
Figures
Comment on
-
A dataset of stereoscopic images and ground-truth disparity mimicking human fixations in peripersonal space.Sci Data. 2017 Mar 28;4:170034. doi: 10.1038/sdata.2017.34. Sci Data. 2017. PMID: 28350382 Free PMC article.
References
-
- Ohzawa I., Freeman R. D. & DeAngelis G. C. Stereoscopic depth discrimination in the visual cortex: Neurons ideally suited as disparity detectors. Science 249, 1037–1041 (1990). - PubMed
-
- Qian N. Computing stereo disparity and motion with known binocular cell properties. Neural Computation 6(3), 390–404 (1994).
-
- Yang Z. & Purves D. A statistical explanation of visual space. Nature neuroscience 6, 632–640 (2003). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
