

Strategies for obstacle avoidance during walking in the cat
- PMID: 28356468
- PMCID: PMC5539443
- DOI: 10.1152/jn.00033.2017
Strategies for obstacle avoidance during walking in the cat
Abstract
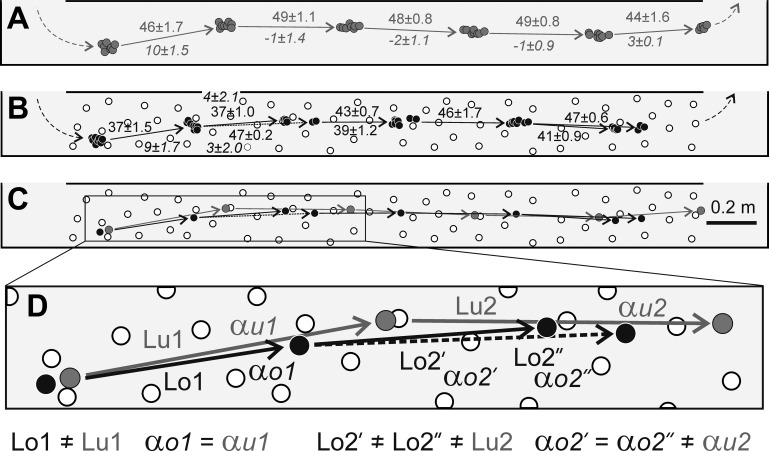
Avoiding obstacles is essential for successful navigation through complex environments. This study aimed to clarify what strategies are used by a typical quadruped, the cat, to avoid obstacles during walking. Four cats walked along a corridor 2.5 m long and 25 or 15 cm wide. Obstacles, small round objects 2.5 cm in diameter and 1 cm in height, were placed on the floor in various locations. Movements of the paw were recorded with a motion capture and analysis system (Visualeyez, PTI). During walking in the wide corridor, cats' preferred strategy for avoiding a single obstacle was circumvention, during which the stride direction changed while stride duration and swing-to-stride duration ratio were preserved. Another strategy, stepping over the obstacle, was used during walking in the narrow corridor, when lateral deviations of walking trajectory were restricted. Stepping over the obstacle involved changes in two consecutive strides. The stride preceding the obstacle was shortened, and swing-to-stride ratio was reduced. The obstacle was negotiated in the next stride of increased height and normal duration and swing-to-stride ratio. During walking on a surface with multiple obstacles, both strategies were used. To avoid contact with the obstacle, cats placed the paw away from the object at a distance roughly equal to the diameter of the paw. During obstacle avoidance cats prefer to alter muscle activities without altering the locomotor rhythm. We hypothesize that a choice of the strategy for obstacle avoidance is determined by minimizing the complexity of neuro-motor processes required to achieve the behavioral goal.NEW & NOTEWORTHY In a study of feline locomotor behavior we found that the preferred strategy to avoid a small obstacle is circumvention. During circumvention, stride direction changes but length and temporal structure are preserved. Another strategy, stepping over the obstacle, is used in narrow walkways. During overstepping, two strides adjust. A stride preceding the obstacle decreases in length and duration. The following stride negotiating the obstacle increases in height while retaining normal temporal structure and nearly normal length.
Keywords: locomotion; motor control; obstacle avoidance; spatial navigation.
Copyright © 2017 the American Physiological Society.
Figures









References
-
- Alexander RM. Optimum walking techniques for quadrupeds and bipeds. J Zool 192: 97–117, 1980. doi: 10.1111/j.1469-7998.1980.tb04222.x. - DOI
-
- Alexander RM. Optimization and gaits in the locomotion of vertebrates. Physiol Rev 69: 1199–1227, 1989. - PubMed
-
- Arshavsky YI, Kots YM, Orlovsky GN, Rodionov IM, Shik ML. Investigation of the biomechanics of running by the dog. Biophysics (Oxf) 10: 737–746, 1965.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous