

Hazards in Motion: Development of Mobile Geofences for Use in Logging Safety
- PMID: 28394303
- PMCID: PMC5422183
- DOI: 10.3390/s17040822
Hazards in Motion: Development of Mobile Geofences for Use in Logging Safety
Abstract
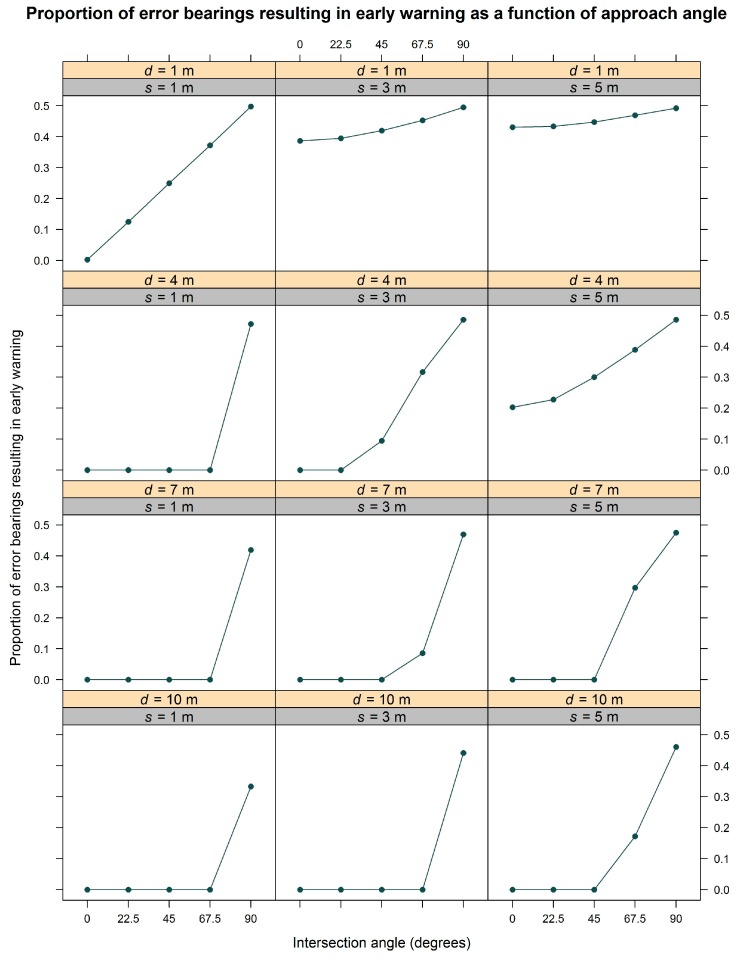
Logging is one of the most hazardous occupations in the United States. Real-time positioning that uses global navigation satellite system (GNSS) technology paired with radio frequency transmission (GNSS-RF) has the potential to reduce fatal and non-fatal accidents on logging operations through the use of geofences that define safe work areas. Until recently, most geofences have been static boundaries. The aim of this study was to evaluate factors affecting mobile geofence accuracy in order to determine whether virtual safety zones around moving ground workers or equipment are a viable option for improving situational awareness on active timber sales. We evaluated the effects of walking pace, transmission interval, geofence radius, and intersection angle on geofence alert delay using a replicated field experiment. Simulation was then used to validate field results and calculate the proportion of GNSS error bearings resulting in early alerts. The interaction of geofence radius and intersection angle affected safety geofence alert delay in the field experiment. The most inaccurate alerts were negative, representing early warning. The magnitude of this effect was largest at the greatest intersection angles. Simulation analysis supported these field results and also showed that larger GNSS error corresponded to greater variability in alert delay. Increasing intersection angle resulted in a larger proportion of directional GNSS error that triggered incorrect, early warnings. Because the accuracy of geofence alerts varied greatly depending on GNSS error and angle of approach, geofencing for occupational safety is most appropriate for general situational awareness unless real-time correction methods to improve accuracy or higher quality GNSS-RF transponders are used.
Keywords: GNSS; GNSS-RF; GPS; GPS-RF; geofence; real-time positioning; situational awareness; virtual fence.
Conflict of interest statement
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
Figures






References
-
- Sygnatur E.F. Logging is perilous work. Compens. Work. Cond. 1998;3:3–9.
-
- Sullman M.J.M., Kirk P.M., Parker R.J., Gaskin J.E. New Zealand logging industry accident reporting scheme: Focus for a human factors research programme. J. Saf. Res. 1999;30:123–131. doi: 10.1016/S0022-4375(99)00006-7. - DOI
-
- Axelsson S.A. The mechanization of logging operations in Sweden and its effect on occupational safety and health. J. For. Eng. 1998;9:25–31.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
