

Overground vs. treadmill-based robotic gait training to improve seated balance in people with motor-complete spinal cord injury: a case report
- PMID: 28399877
- PMCID: PMC5387335
- DOI: 10.1186/s12984-017-0236-z
Overground vs. treadmill-based robotic gait training to improve seated balance in people with motor-complete spinal cord injury: a case report
Abstract
Background: Robotic overground gait training devices, such as the Ekso, require users to actively participate in triggering steps through weight-shifting movements. It remains unknown how much the trunk muscles are activated during these movements, and if it is possible to transfer training effects to seated balance control. This study was conducted to compare the activity of postural control muscles of the trunk during overground (Ekso) vs. treadmill-based (Lokomat) robotic gait training, and evaluate changes in seated balance control in people with high-thoracic motor-complete spinal cord injury (SCI).
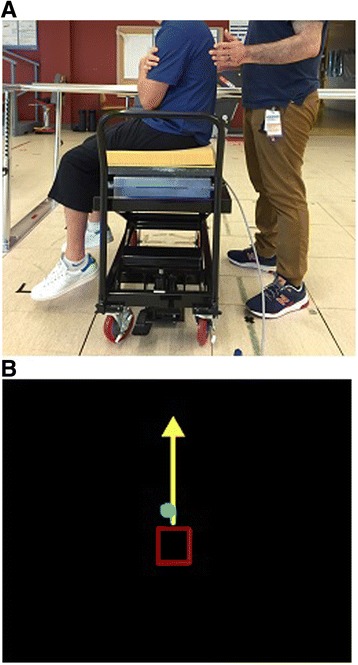
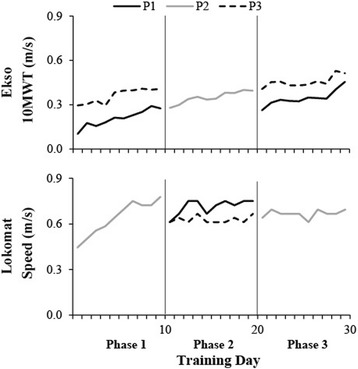
Methods: Three individuals with motor-complete SCI from C7-T4, assumed to have no voluntary motor function below the chest, underwent robotic gait training. The participants were randomly assigned to Ekso-Lokomat-Ekso or Lokomat-Ekso-Lokomat for 10 sessions within each intervention phase for a total of 30 sessions. We evaluated static and dynamic balance control through analysis of center of pressure (COP) movements after each intervention phase. Surface electromyography was used to compare activity of the abdominal and erector spinae muscles during Ekso and Lokomat walking.
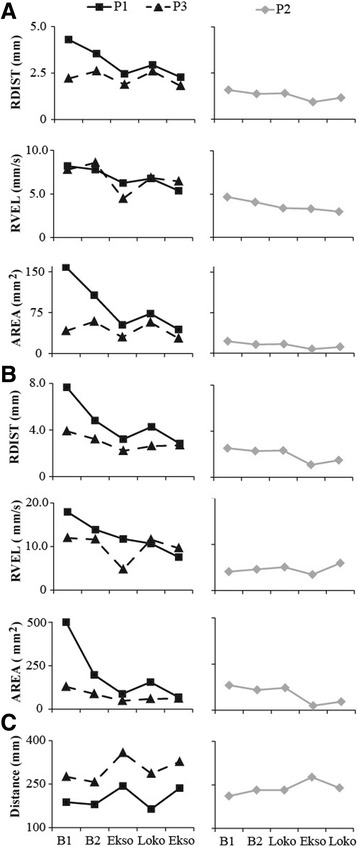
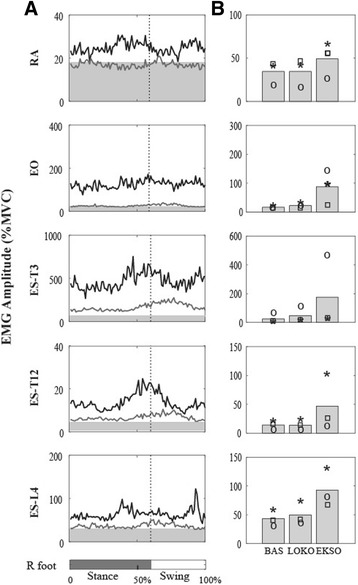
Results: We observed improved postural stability after training with Ekso compared to Lokomat during static balance tasks, indicated by reduced COP root mean square distance and ellipse area. In addition, Ekso training increased total distance of COP movements during a dynamic balance task. The trunk muscles showed increased activation during Ekso overground walking compared to Lokomat walking.
Conclusions: Our findings suggest that the Ekso actively recruits trunk muscles through postural control mechanisms, which may lead to improved balance during sitting. Developing effective training strategies to reactivate the trunk muscles is important to facilitate independence during seated balance activity in people with SCI.
Keywords: Balance; Gait; Motor activity; Robotics; Spinal cord injury.
Figures
Similar articles
-
Overground walking with a robotic exoskeleton elicits trunk muscle activity in people with high-thoracic motor-complete spinal cord injury.J Neuroeng Rehabil. 2018 Nov 20;15(1):109. doi: 10.1186/s12984-018-0453-0. J Neuroeng Rehabil. 2018. PMID: 30458839 Free PMC article.
-
Energy cost and psychological impact of robotic-assisted gait training in people with spinal cord injury: effect of two different types of devices.Neurol Sci. 2021 Aug;42(8):3357-3366. doi: 10.1007/s10072-020-04954-w. Epub 2021 Jan 7. Neurol Sci. 2021. PMID: 33411195 Clinical Trial.
-
Lokomat robotic-assisted versus overground training within 3 to 6 months of incomplete spinal cord lesion: randomized controlled trial.Neurorehabil Neural Repair. 2012 Nov-Dec;26(9):1058-63. doi: 10.1177/1545968312448232. Epub 2012 Jun 13. Neurorehabil Neural Repair. 2012. PMID: 22699827 Clinical Trial.
-
Comparative efficacy of robotic exoskeleton and conventional gait training in patients with spinal cord injury: a meta-analysis of randomized controlled trials.J Neuroeng Rehabil. 2025 May 29;22(1):121. doi: 10.1186/s12984-025-01649-1. J Neuroeng Rehabil. 2025. PMID: 40442684 Free PMC article.
-
The effects of robot assisted gait training on temporal-spatial characteristics of people with spinal cord injuries: A systematic review.J Spinal Cord Med. 2018 Sep;41(5):529-543. doi: 10.1080/10790268.2018.1426236. Epub 2018 Feb 5. J Spinal Cord Med. 2018. PMID: 29400988 Free PMC article.
Cited by
-
Exoskeletal wearable robot on ambulatory function in patients with stroke: a protocol for an international, multicentre, randomised controlled study.BMJ Open. 2023 Aug 11;13(8):e065298. doi: 10.1136/bmjopen-2022-065298. BMJ Open. 2023. PMID: 37567748 Free PMC article.
-
Robot-Assisted Gait Training in Individuals With Spinal Cord Injury: A Systematic Review and Meta-Analysis of Randomized Controlled Trials.Ann Rehabil Med. 2024 Jun;48(3):171-191. doi: 10.5535/arm.230039. Epub 2024 Jun 28. Ann Rehabil Med. 2024. PMID: 38950970 Free PMC article.
-
Rehabilitation Program for Gait Training Using UAN.GO, a Powered Exoskeleton: A Case Report.Neurol Int. 2022 Jun 16;14(2):536-546. doi: 10.3390/neurolint14020043. Neurol Int. 2022. PMID: 35736624 Free PMC article.
-
Trunk muscle activity and kinematics during boxing and battle rope exercise in people with motor-complete spinal cord injury.J Spinal Cord Med. 2024 Jan;47(1):135-142. doi: 10.1080/10790268.2021.2005993. Epub 2021 Dec 7. J Spinal Cord Med. 2024. PMID: 34874241 Free PMC article.
-
A systematic review of the determinants of implementation of a locomotor training program using a powered exoskeleton for individuals with a spinal cord injury.Clin Rehabil. 2023 Aug;37(8):1119-1138. doi: 10.1177/02692155231164092. Epub 2023 Apr 10. Clin Rehabil. 2023. PMID: 37036438 Free PMC article.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
