

Nanomechanics of individual aerographite tetrapods
- PMID: 28401930
- PMCID: PMC5394344
- DOI: 10.1038/ncomms14982
Nanomechanics of individual aerographite tetrapods
Abstract
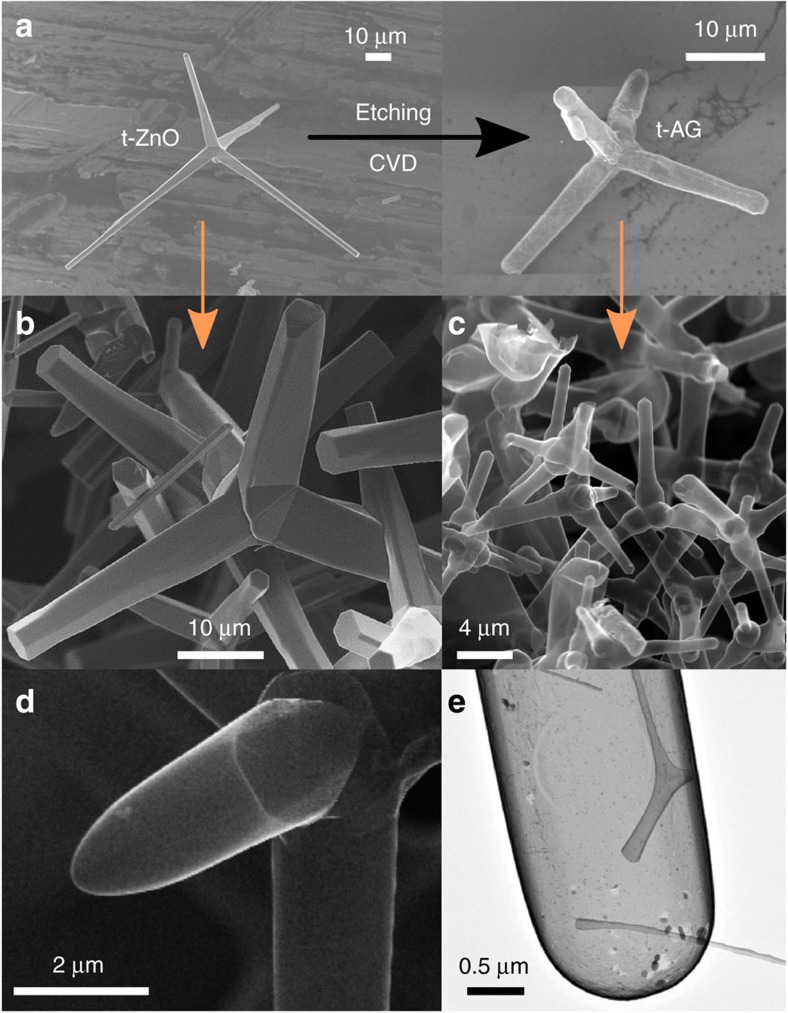
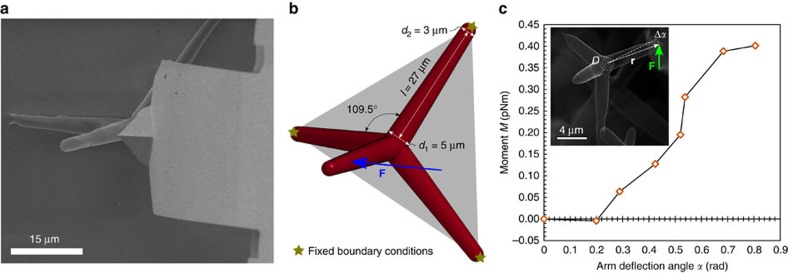
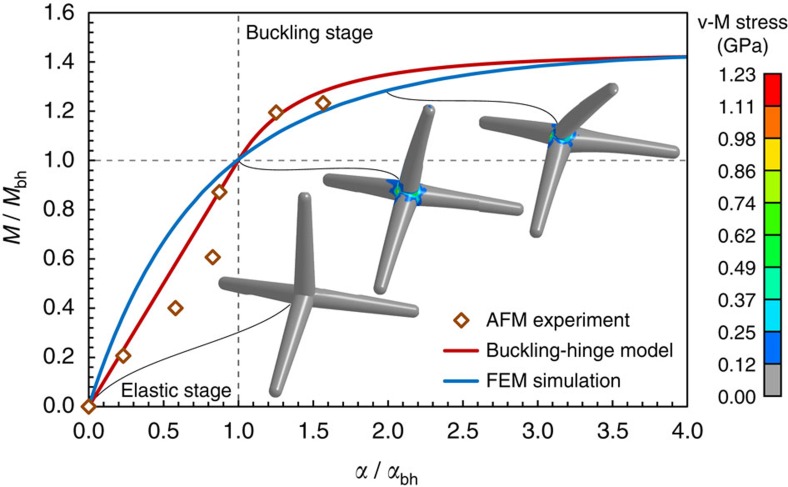
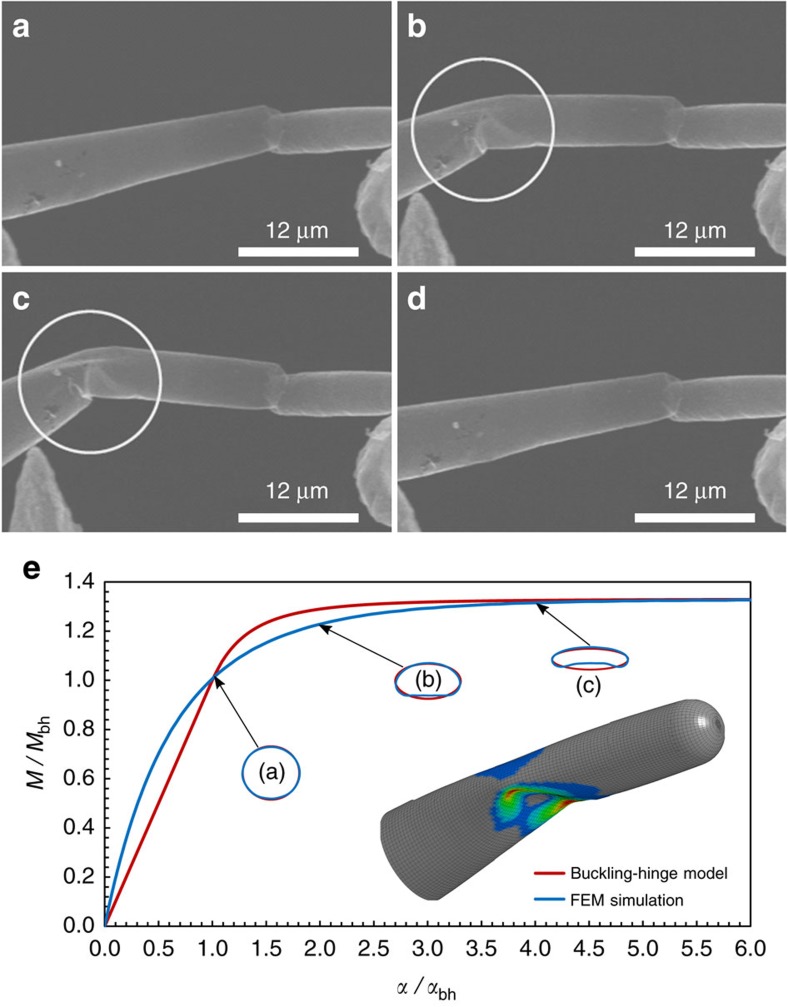
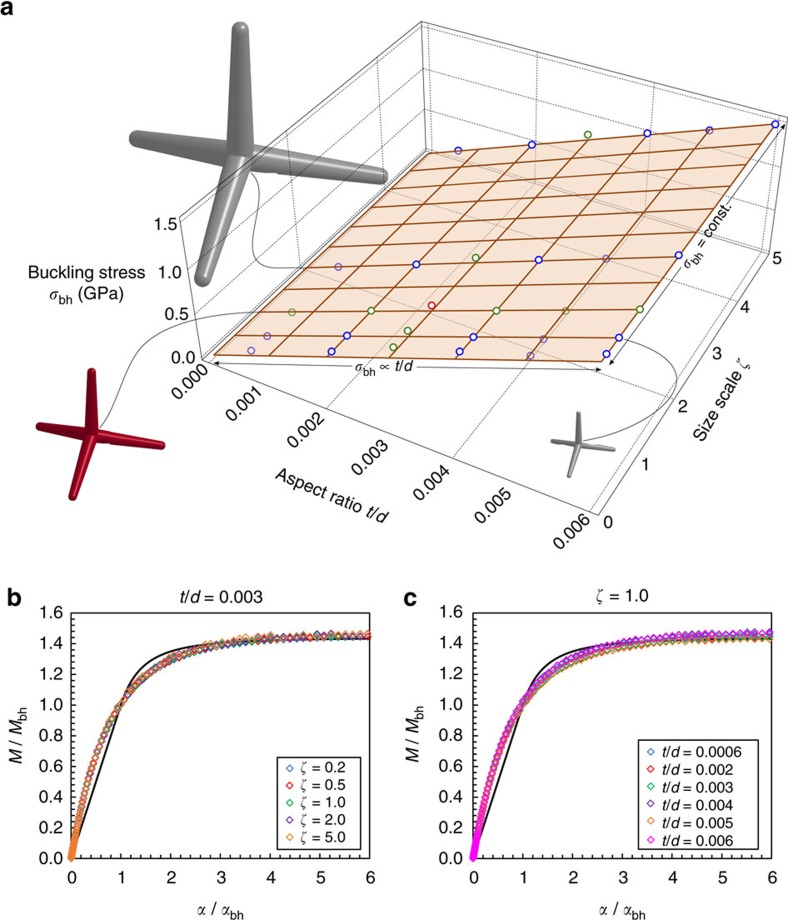
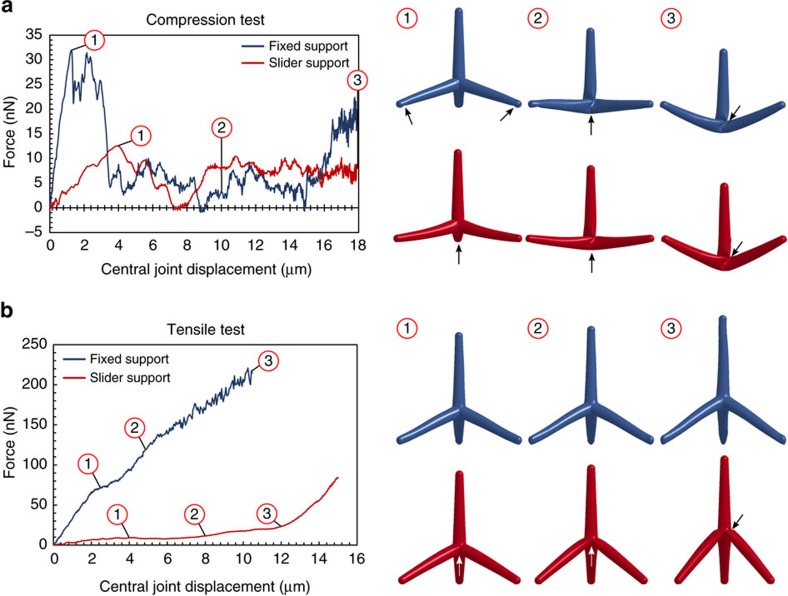
Carbon-based three-dimensional aerographite networks, built from interconnected hollow tubular tetrapods of multilayer graphene, are ultra-lightweight materials recently discovered and ideal for advanced multifunctional applications. In order to predict the bulk mechanical behaviour of networks it is very important to understand the mechanics of their individual building blocks. Here we characterize the mechanical response of single aerographite tetrapods via in situ scanning electron and atomic force microscopy measurements. To understand the acquired results, which show that the overall behaviour of the tetrapod is governed by the buckling of the central joint, a mechanical nonlinear model was developed, introducing the concept of the buckling hinge. Finite element method simulations elucidate the governing buckling phenomena. The results are then generalized for tetrapods of different size-scales and shapes. These basic findings will permit better understanding of the mechanical response of the related networks and the design of similar aerogels based on graphene and other two-dimensional materials.
Conflict of interest statement
The authors declare no competing financial interests.
Figures
References
-
- Liu F., Piao Y., Choi J. S. & Seo T. S. Three-dimensional graphene micropillar based electrochemical sensor for phenol detection. Biosens. Bioelectron. 50, 387–392 (2013). - PubMed
-
- Wang H., Sun K., Tao F., Stacchiola D. J. & Hu Y. H. 3D honeycomb like structured graphene and its high efficiency as a counter electrode catalyst for dye sensitized solar cells. Angew. Chem. Int. Ed. 125, 9380–9384 (2013). - PubMed
-
- Chen S. et al. Elastic carbon foam via direct carbonization of polymer foam for flexible electrode and organic chemical adsorption. Energy Environ. Sci. 6, 2435–2439 (2013).
-
- Choi B. G., Yang M., Hong W. H., Choi J. W. & Huh Y. S. 3D macroporous graphene frameworks for supercapacitors with high energy and power densities. ACS Nano 6, 4020–4028 (2012). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
