

Validation of enhanced kinect sensor based motion capturing for gait assessment
- PMID: 28410413
- PMCID: PMC5391956
- DOI: 10.1371/journal.pone.0175813
Validation of enhanced kinect sensor based motion capturing for gait assessment
Abstract
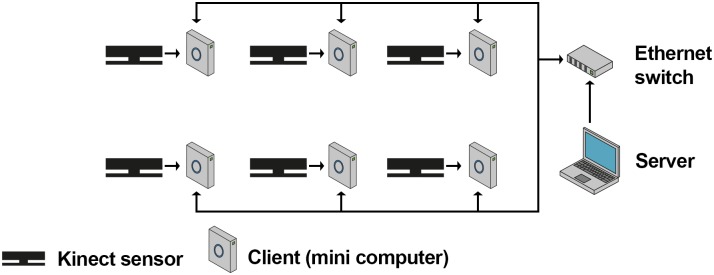
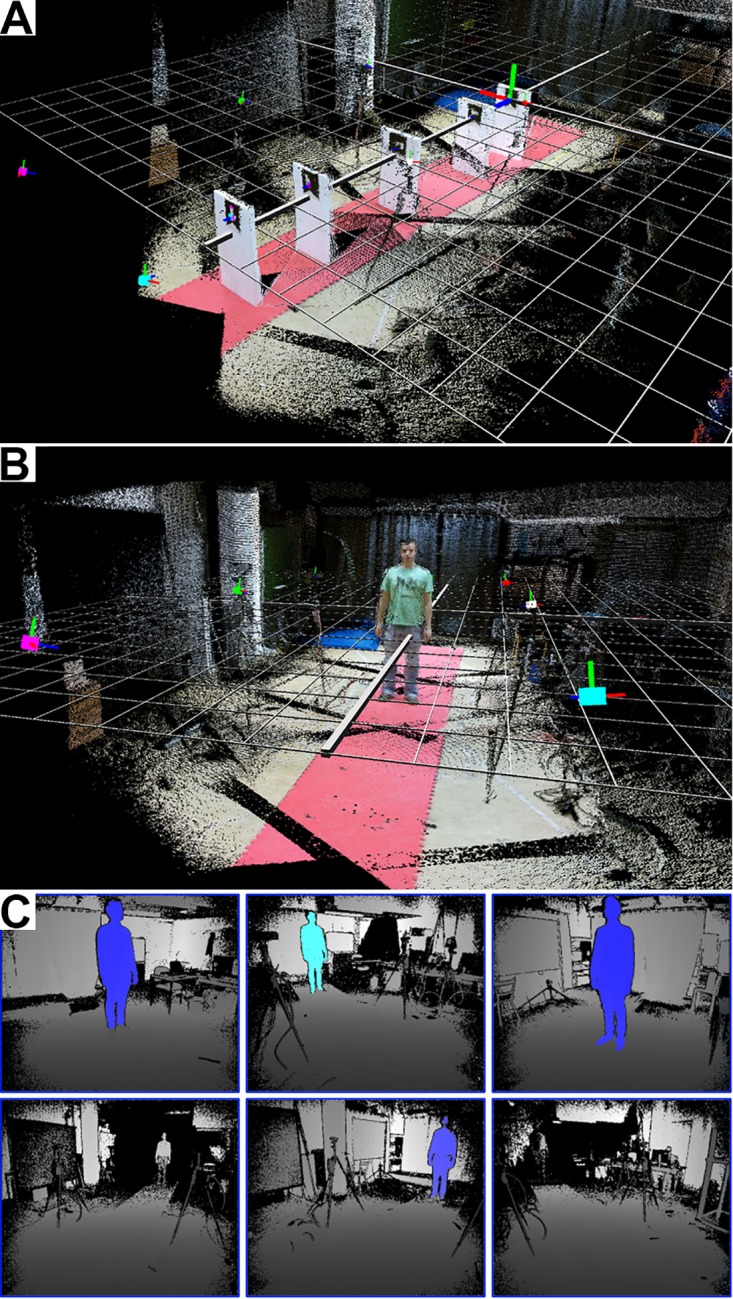
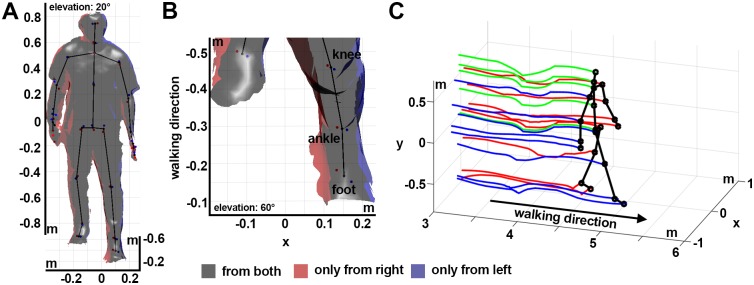
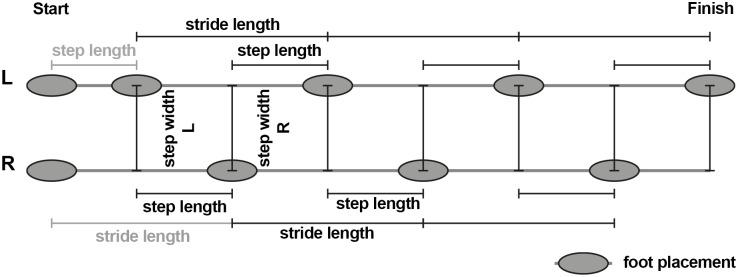
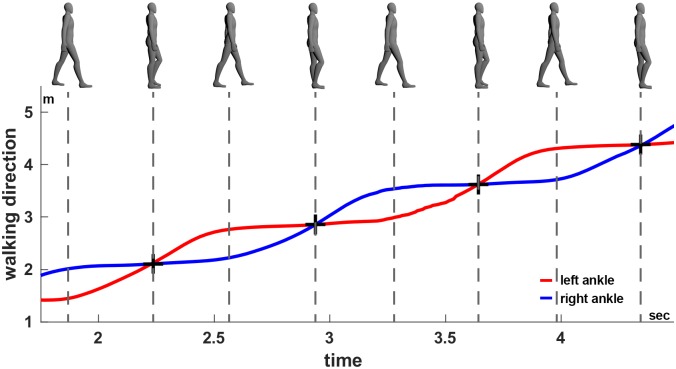
Optical motion capturing systems are expensive and require substantial dedicated space to be set up. On the other hand, they provide unsurpassed accuracy and reliability. In many situations however flexibility is required and the motion capturing system can only temporarily be placed. The Microsoft Kinect v2 sensor is comparatively cheap and with respect to gait analysis promising results have been published. We here present a motion capturing system that is easy to set up, flexible with respect to the sensor locations and delivers high accuracy in gait parameters comparable to a gold standard motion capturing system (VICON). Further, we demonstrate that sensor setups which track the person only from one-side are less accurate and should be replaced by two-sided setups. With respect to commonly analyzed gait parameters, especially step width, our system shows higher agreement with the VICON system than previous reports.
Conflict of interest statement
Figures
References
-
- Kaenchan S, Mongkolnam P, Watanapa B, Sathienpong S. Automatic multiple Kinect cameras setting for simple walking posture analysis. International Computer Science and Engineering Conference (ICSEC); 2013. pp. 245–249.
-
- Wang Q, Kurillo G, Ofli F, Bajcsy R. Evaluation of Pose Tracking Accuracy in the First and Second Generations of Microsoft Kinect. IEEE International Conference on Healthcare Informatics (ICHI); 2015. pp. 380–389.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
