

Variable Admittance Control Based on Fuzzy Reinforcement Learning for Minimally Invasive Surgery Manipulator
- PMID: 28417944
- PMCID: PMC5424721
- DOI: 10.3390/s17040844
Variable Admittance Control Based on Fuzzy Reinforcement Learning for Minimally Invasive Surgery Manipulator
Abstract
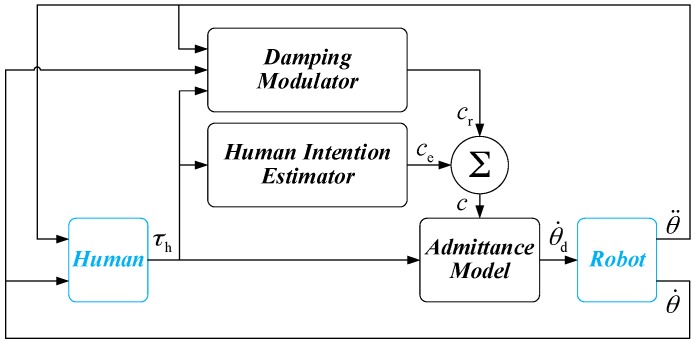
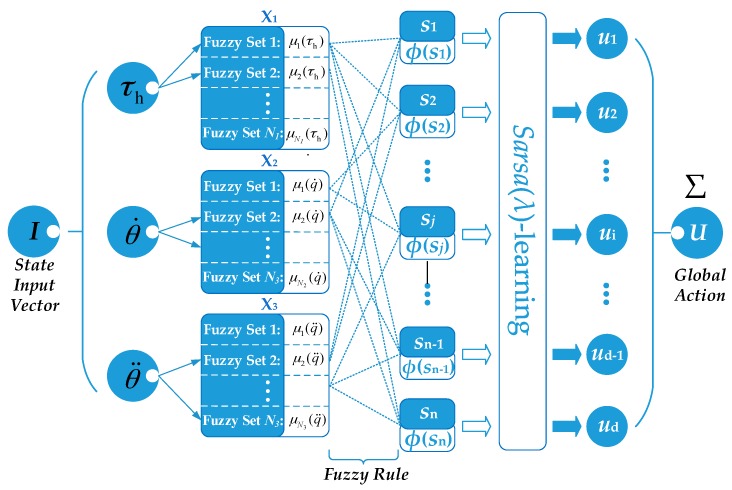
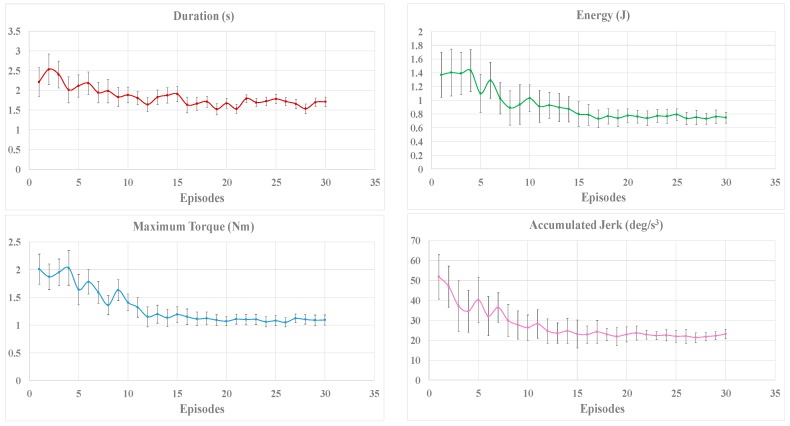
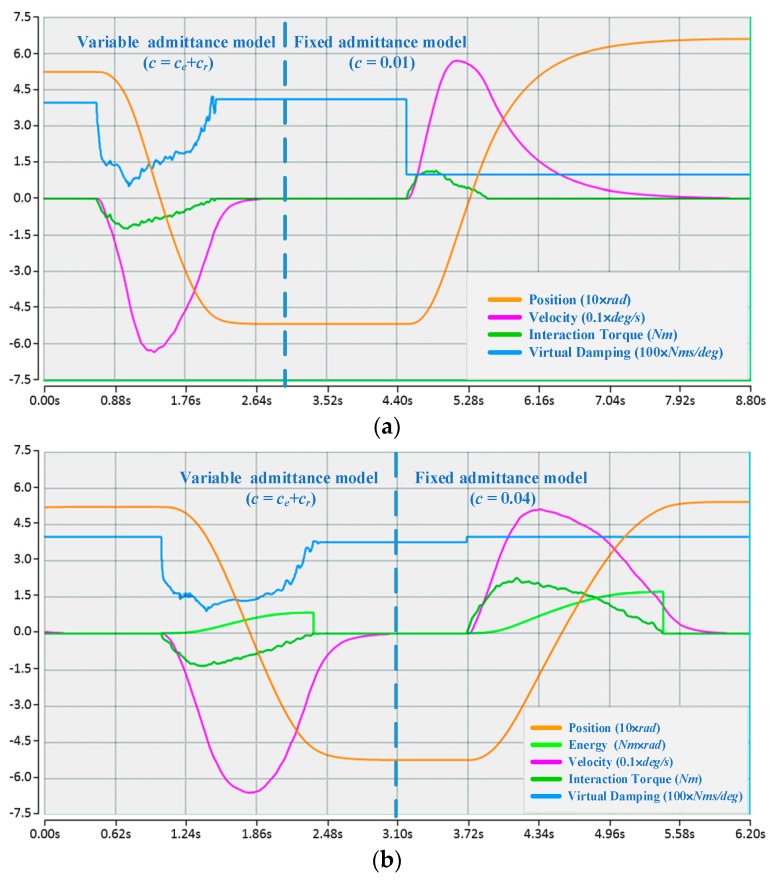
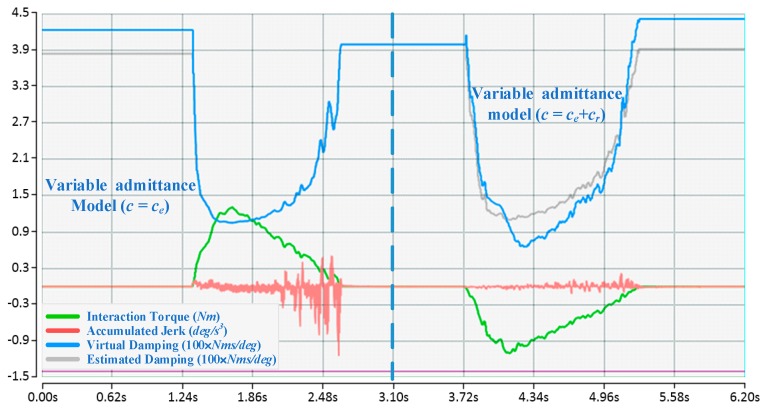
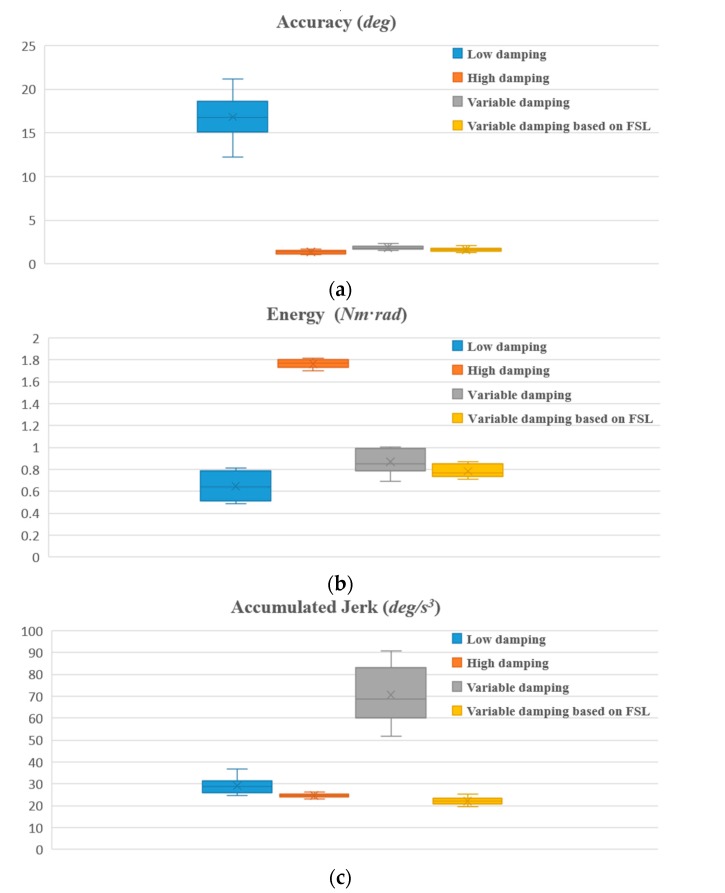
In order to get natural and intuitive physical interaction in the pose adjustment of the minimally invasive surgery manipulator, a hybrid variable admittance model based on Fuzzy Sarsa(λ)-learning is proposed in this paper. The proposed model provides continuous variable virtual damping to the admittance controller to respond to human intentions, and it effectively enhances the comfort level during the task execution by modifying the generated virtual damping dynamically. A fuzzy partition defined over the state space is used to capture the characteristics of the operator in physical human-robot interaction. For the purpose of maximizing the performance index in the long run, according to the identification of the current state input, the virtual damping compensations are determined by a trained strategy which can be learned through the experience generated from interaction with humans, and the influence caused by humans and the changing dynamics in the robot are also considered in the learning process. To evaluate the performance of the proposed model, some comparative experiments in joint space are conducted on our experimental minimally invasive surgical manipulator.
Keywords: minimally invasive surgical robot; physical human-robot interaction; reinforcement learning; variable admittance control.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Meireles O., Horgan S. Applications of surgical robotics in general surgery. In: Rosen J., Hannaford B., Satava R.M., editors. Surgical Robotics: Systems, Applications, and Visions. Springer; New York, NY, USA: 2011. pp. 791–812.
-
- Wang W., Wang W.D., Dong W., Yu H.J., Yan Z.Y., Du Z.J. Dimensional optimization of a minimally invasive surgical robot system based on NSGA-II algorithm. Adv. Mech. Eng. 2015;7:1687814014568541. doi: 10.1177/1687814014568541. - DOI
-
- De Santis A., Siciliano B., De Luca A., Bicchi A. An atlas of physical human–robot interaction. Mech. Mach. Theory. 2008;43:253–270. doi: 10.1016/j.mechmachtheory.2007.03.003. - DOI
-
- Mitchell B., Koo J., Iordachita I., Kazanzides P., Kapoor A., Handa J., Taylor R. Development and application of a new steady-hand manipulator for retinal surgery; Proceedings of the 2007 IEEE International Conference on Robotics and Automation; Roma, Italy. 10–14 April 2007; pp. 623–629.
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
