

Hybrid finite difference/finite element immersed boundary method
- PMID: 28425587
- PMCID: PMC5650596
- DOI: 10.1002/cnm.2888
Hybrid finite difference/finite element immersed boundary method
Abstract
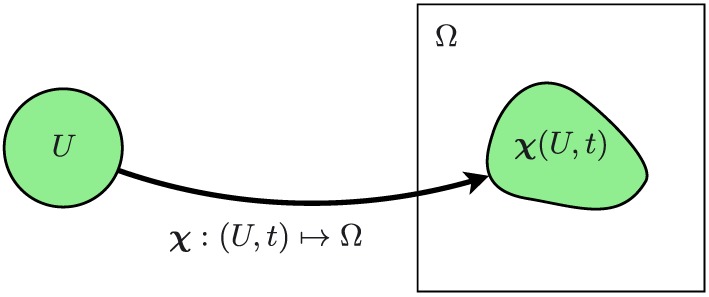
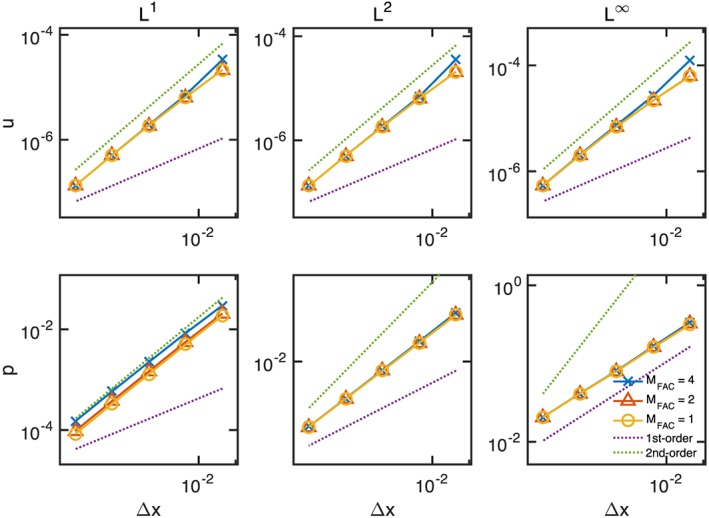
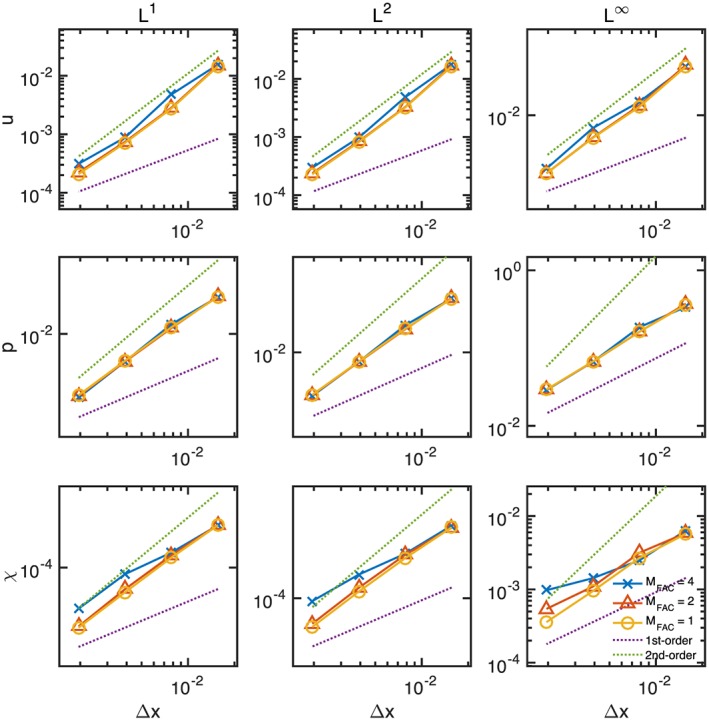
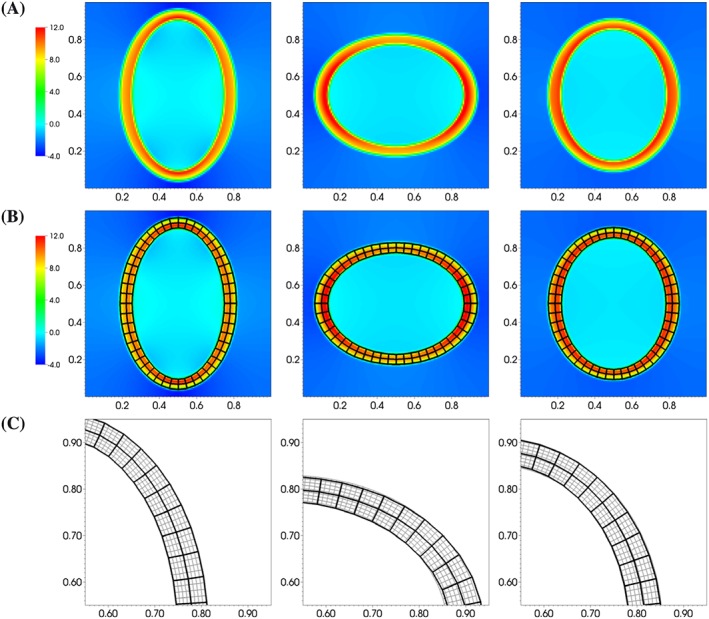
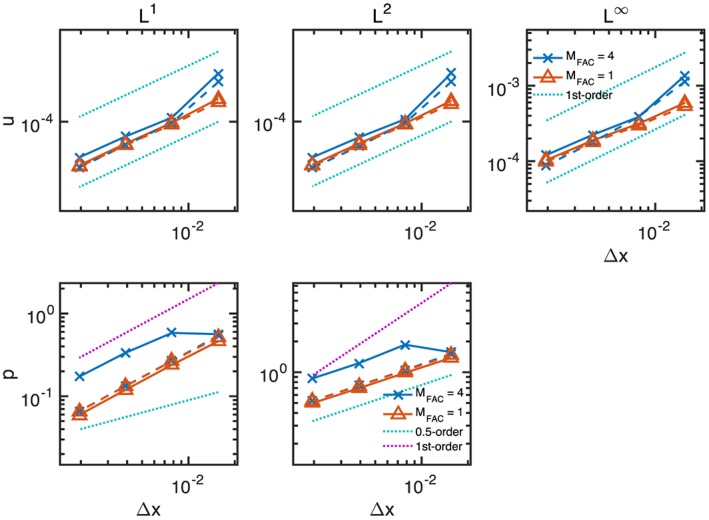
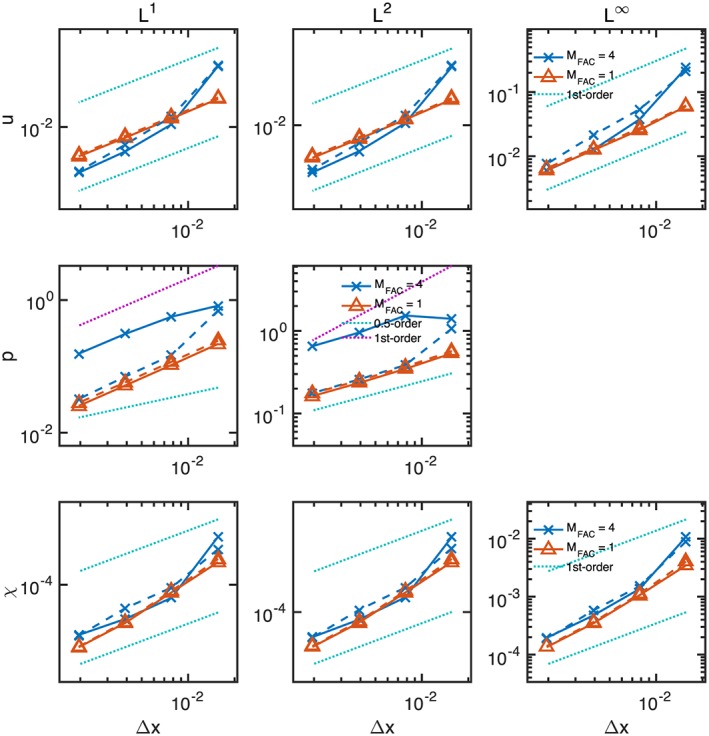
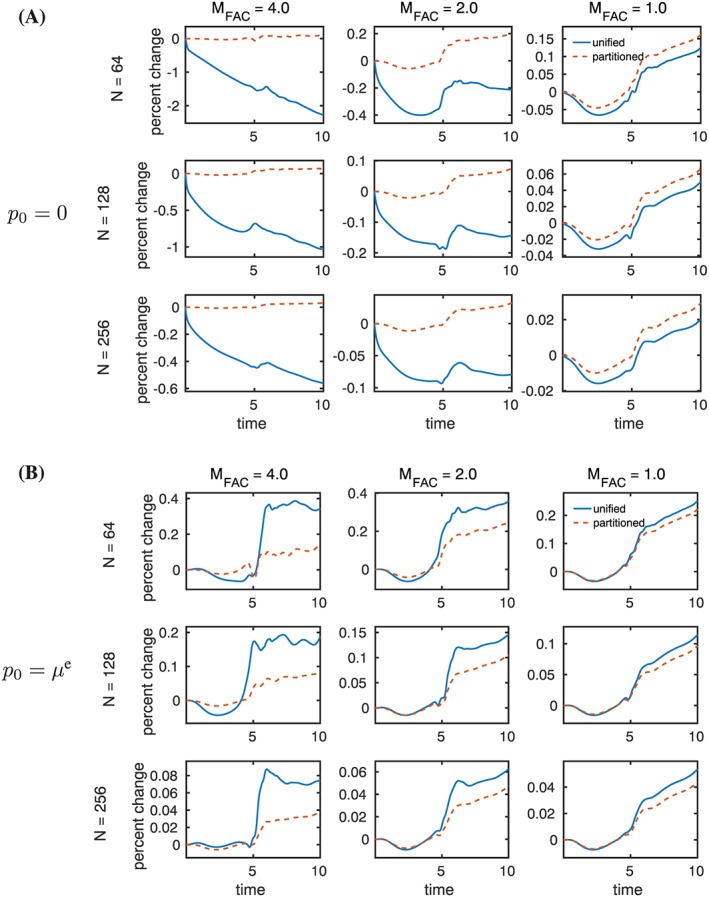
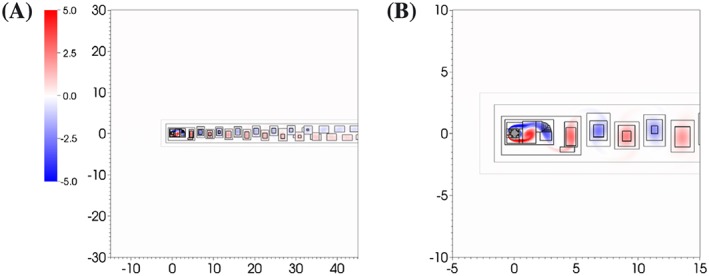
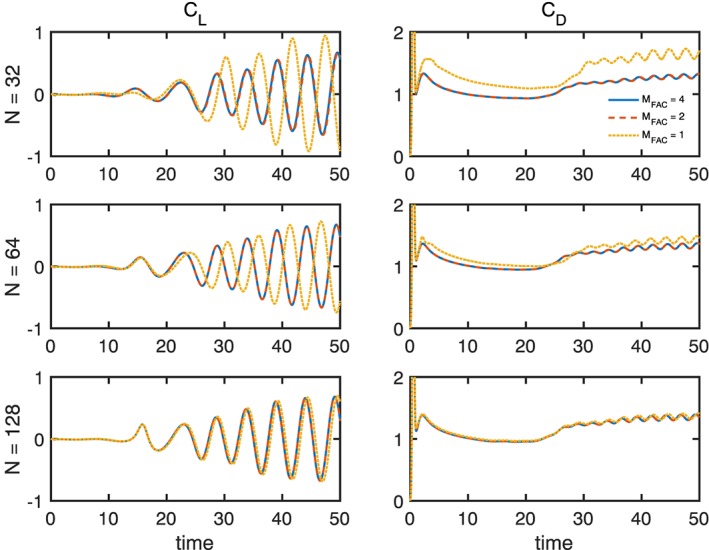
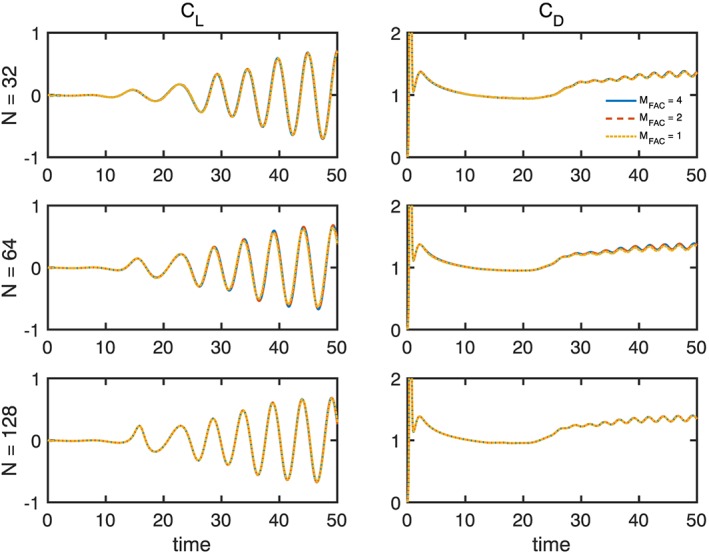
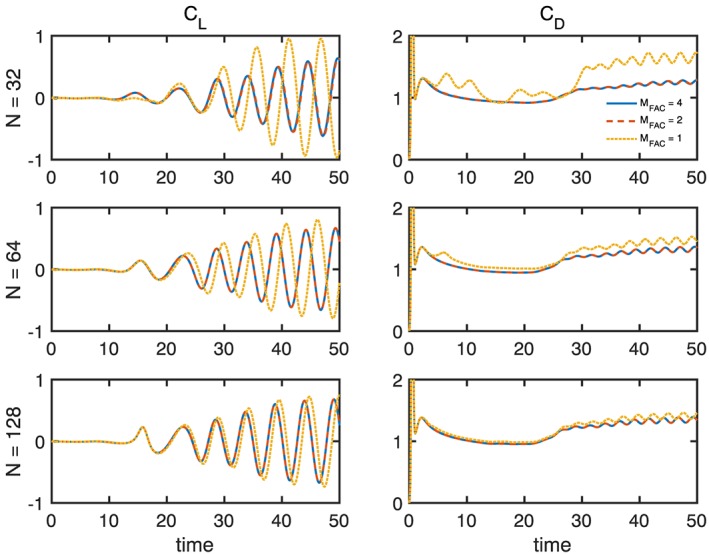
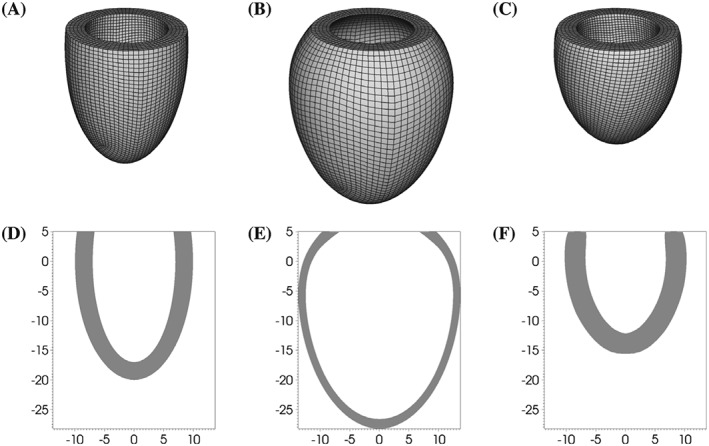
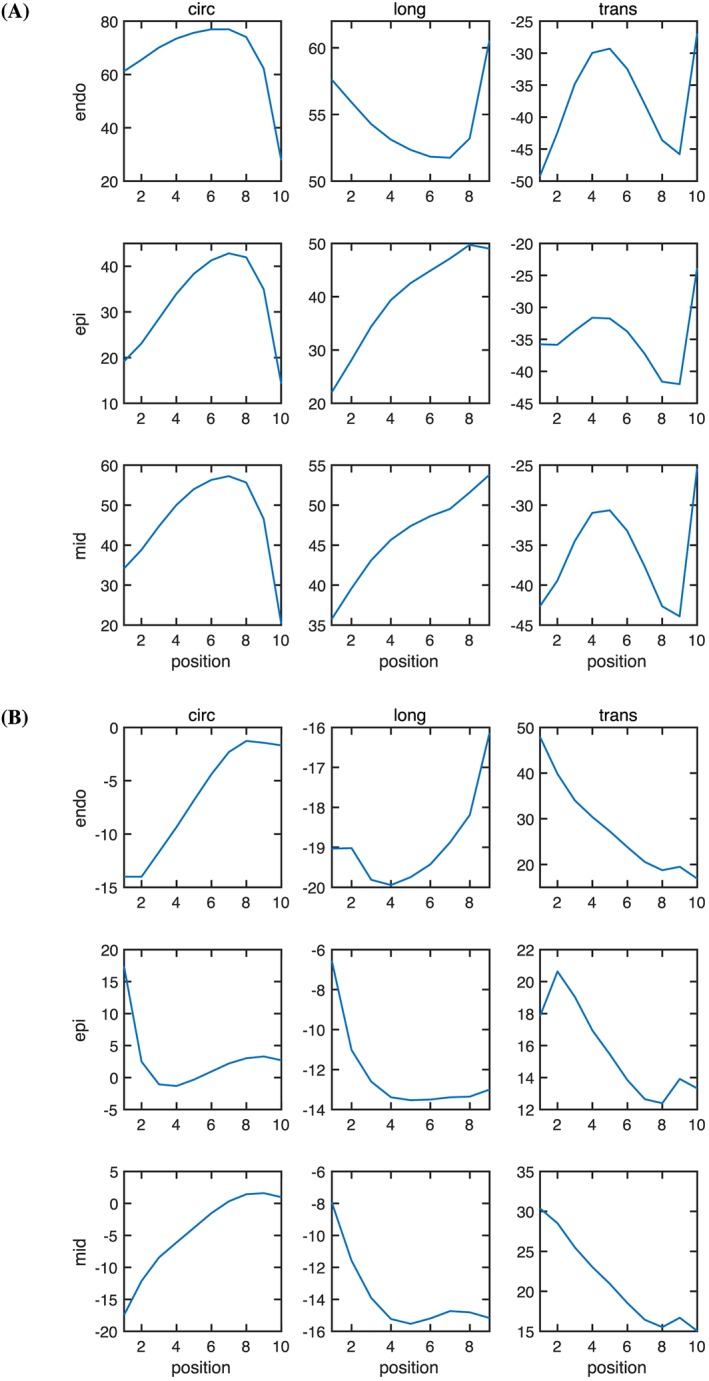
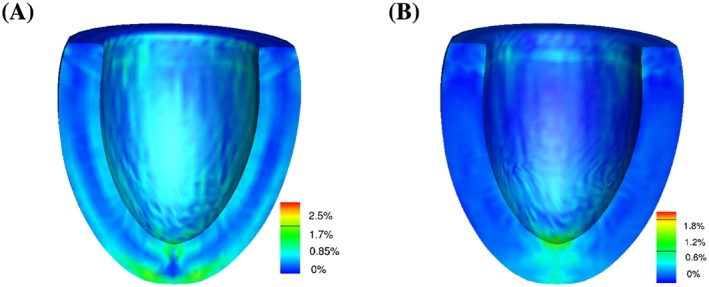
The immersed boundary method is an approach to fluid-structure interaction that uses a Lagrangian description of the structural deformations, stresses, and forces along with an Eulerian description of the momentum, viscosity, and incompressibility of the fluid-structure system. The original immersed boundary methods described immersed elastic structures using systems of flexible fibers, and even now, most immersed boundary methods still require Lagrangian meshes that are finer than the Eulerian grid. This work introduces a coupling scheme for the immersed boundary method to link the Lagrangian and Eulerian variables that facilitates independent spatial discretizations for the structure and background grid. This approach uses a finite element discretization of the structure while retaining a finite difference scheme for the Eulerian variables. We apply this method to benchmark problems involving elastic, rigid, and actively contracting structures, including an idealized model of the left ventricle of the heart. Our tests include cases in which, for a fixed Eulerian grid spacing, coarser Lagrangian structural meshes yield discretization errors that are as much as several orders of magnitude smaller than errors obtained using finer structural meshes. The Lagrangian-Eulerian coupling approach developed in this work enables the effective use of these coarse structural meshes with the immersed boundary method. This work also contrasts two different weak forms of the equations, one of which is demonstrated to be more effective for the coarse structural discretizations facilitated by our coupling approach.
Keywords: finite difference method; finite element method; fluid-structure interaction; immersed boundary method; incompressible elasticity; incompressible flow.
© 2017 The Authors International Journal for Numerical Methods in Biomedical Engineering Published by John Wiley & Sons Ltd.
Figures


References
-
- Peskin CS. Flow patterns around heart valves: a numerical method. J Comput Phys. 1972;10(2):252‐271.
-
- Peskin CS. Numerical analysis of blood flow in the heart. J Comput Phys. 1977;25(3):220‐252.
-
- Peskin CS. The immersed boundary method. Acta Numer. 2002;11:479‐517.
-
- Miller LA, Peskin CS. When vortices stick: an aerodynamic transition in tiny insect flight. J Exp Biol. 2004;207(17):3073‐3088. - PubMed
-
- Miller LA, Peskin CS. A computational fluid dynamics of ‘clap and fling’ in the smallest insects. J Exp Biol. 2005;208(2):195‐212. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
