

Fast-moving soft electronic fish
- PMID: 28435879
- PMCID: PMC5381956
- DOI: 10.1126/sciadv.1602045
Fast-moving soft electronic fish
Abstract
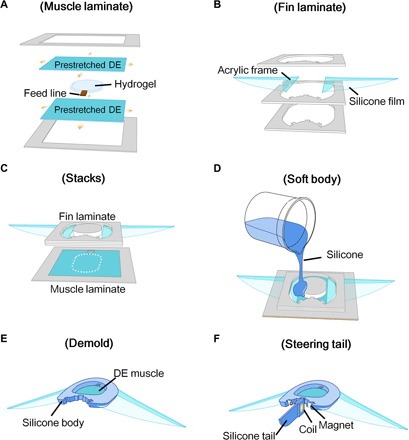
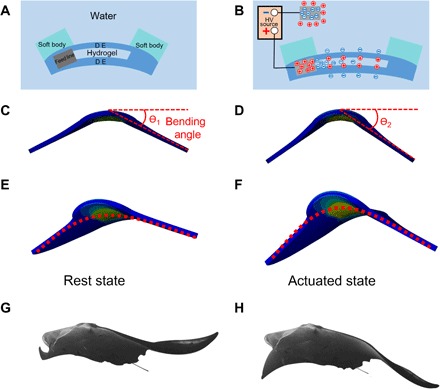
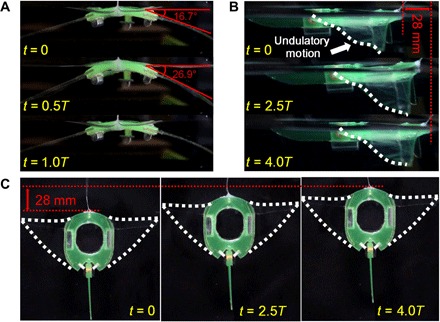
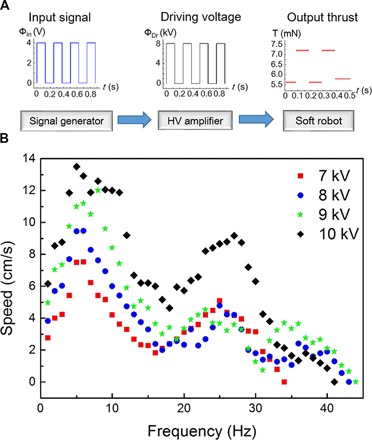
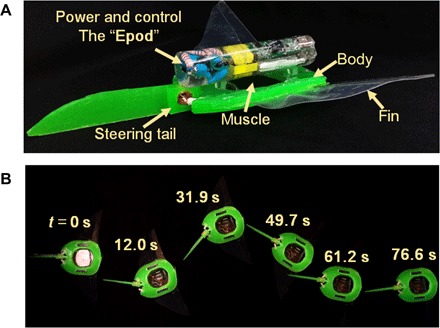
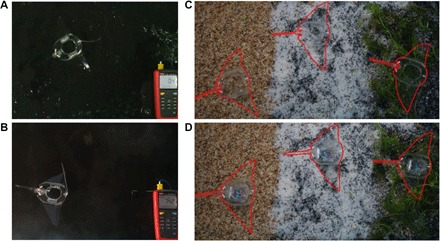
Soft robots driven by stimuli-responsive materials have unique advantages over conventional rigid robots, especially in their high adaptability for field exploration and seamless interaction with humans. The grand challenge lies in achieving self-powered soft robots with high mobility, environmental tolerance, and long endurance. We are able to advance a soft electronic fish with a fully integrated onboard system for power and remote control. Without any motor, the fish is driven solely by a soft electroactive structure made of dielectric elastomer and ionically conductive hydrogel. The electronic fish can swim at a speed of 6.4 cm/s (0.69 body length per second), which is much faster than previously reported untethered soft robotic fish driven by soft responsive materials. The fish shows consistent performance in a wide temperature range and permits stealth sailing due to its nearly transparent nature. Furthermore, the fish is robust, as it uses the surrounding water as the electric ground and can operate for 3 hours with one single charge. The design principle can be potentially extended to a variety of flexible devices and soft robots.
Keywords: aquatic robot; dielectric elastomer; hydrogel; soft robot.
Figures
References
-
- Rus D., Tolley M. T., Design, fabrication and control of soft robots. Nature 521, 467–475 (2015). - PubMed
-
- Rogers J. A., Someya T., Huang Y., Materials and mechanics for stretchable electronics. Science 327, 1603–1607 (2010). - PubMed
-
- Trivedi D., Rahn C. D., Kier W. M., Walker I. D., Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 5, 99–117 (2008).
-
- Kim S., Laschi C., Trimmer B., Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 31, 287–294 (2013). - PubMed
-
- Mengüç Y., Park Y.-L., Pei H., Vogt D., Aubin P. M., Winchell E., Fluke L., Stirling L., Wood R. J., Walsh C. J., Wearable soft sensing suit for human gait measurement. Int. J. Rob. Res. 33, 1748–1764 (2014).
LinkOut - more resources
Full Text Sources
Other Literature Sources
