

A preliminary investigation into the design of pressure cushions and their potential applications for forearm robotic orthoses
- PMID: 28482892
- PMCID: PMC5422883
- DOI: 10.1186/s12938-017-0345-8
A preliminary investigation into the design of pressure cushions and their potential applications for forearm robotic orthoses
Abstract
Background: Load cells are often used in rehabilitation robotics to monitor human-robot interaction. While load cells are accurate and suitable for the stationary end-point robots used in rehabilitation hospitals, their cost and inability to conform to the shape of the body hinder their application in developing affordable and wearable robotic orthoses for assisting individuals in the activities of daily living. This exploratory work investigates the possibility of using an alternative technology, namely compliant polymeric air cushions, to measure interaction forces between the user and a wearable rigid structure.
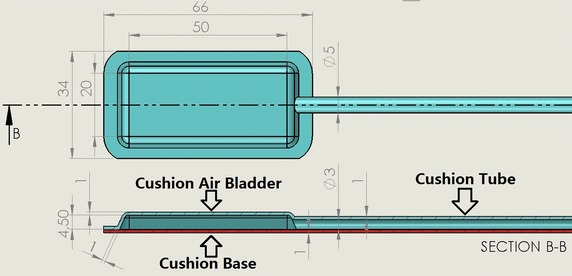
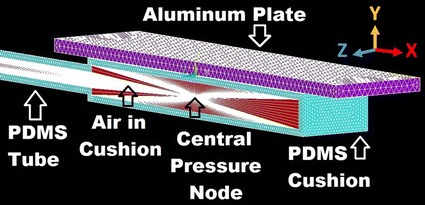
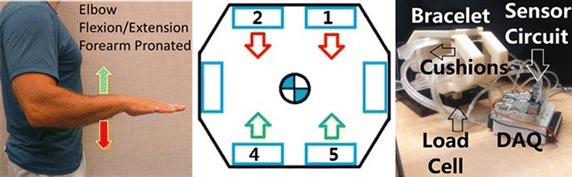
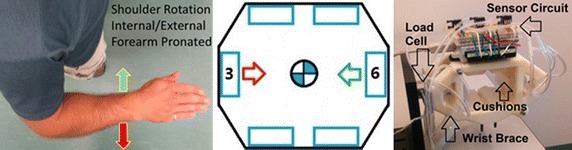
Methods: A polymeric air cushion was designed, analyzed using a finite element model (FEM), and tested using a bench-top characterization system. The cushions underwent repeatability testing, and signal delay testing from a step response while increasing the length of the cushion's tubes. Subsequently, a 3D printed wrist brace prototype was integrated with six polymeric air cushions and tested in static conditions where a volunteer exerted isometric pronation/supination torque and forces in vertical and horizontal directions. The load measured by integrating data recorded by the six sensors was compared with force data measured by a high quality load cell and torque sensor.
Results: The FEM and experimental data comparison was within the error bounds of the external differential pressure sensor used to monitor the pressure inside the cushion. The ratio obtained experimentally between the pressure inside the pressure cushion and the 8 N applied load deviated by only 1.28% from the FEM. A drift smaller than 1% was observed over 10 cycles. The rise times of the cushion under an 8 N step response for a 0.46, 1.03, and 2.02 m length tube was 0.45, 0.39, and 0.37 s. Tests with the wrist brace showed a moderate root mean square error (RMSE) between the force estimated by the pressure cushions and the external load cells. Specifically, the RMSE was 13 mNm, 500 mN, and 1.24 N for forearm pronation/supination torque, vertical force, and horizontal force, respectively.
Conclusions: The use of compliant pressure cushions was shown to be promising for monitoring interaction forces between the forearm and a rigid brace. This work lays the foundation for the future design of an array of pressure cushions for robotic orthoses. Future research should also investigate the compatibility of these polymeric cushions for data acquisition during functional magnetic resonance imaging in shielded rooms.
Keywords: Air; Exoskeleton; Force; Polydimethylsiloxane (PDMS); Polymer; Rehabilitation; Sensors; Wearable.
Figures












References
-
- Ang KK, Guan C, Phua KS, Wang C, Zhou L, Tang KY, et al. Brain-computer interface-based robotic end effector system for wrist and hand rehabilitation: results of a three-armed randomized controlled trial for chronic stroke. Front Neuroeng. 2014;7:30. doi: 10.3389/fneng.2014.00030. - DOI - PMC - PubMed
-
- Gupta A, O’Malley MK, Patoglu V, Burgar C. Design, control and performance of ricewrist: a force feedback wrist exoskeleton for rehabilitation and training. Int J Robot Res. 2008;27:233–251. doi: 10.1177/0278364907084261. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
