

An ecologically-controlled exoskeleton can improve balance recovery after slippage
- PMID: 28492520
- PMCID: PMC5426188
- DOI: 10.1038/srep46721
An ecologically-controlled exoskeleton can improve balance recovery after slippage
Abstract
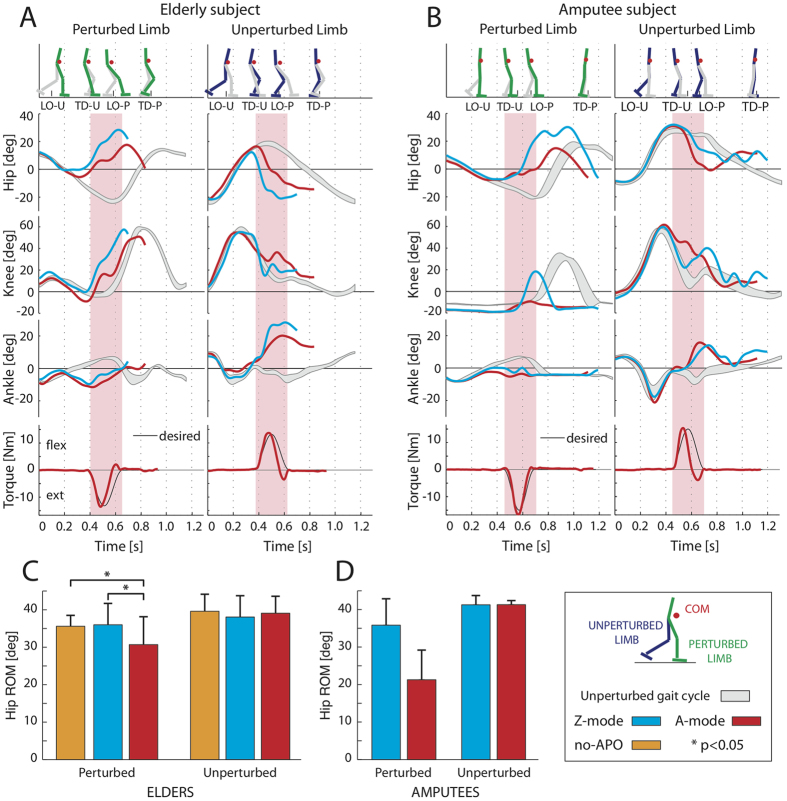
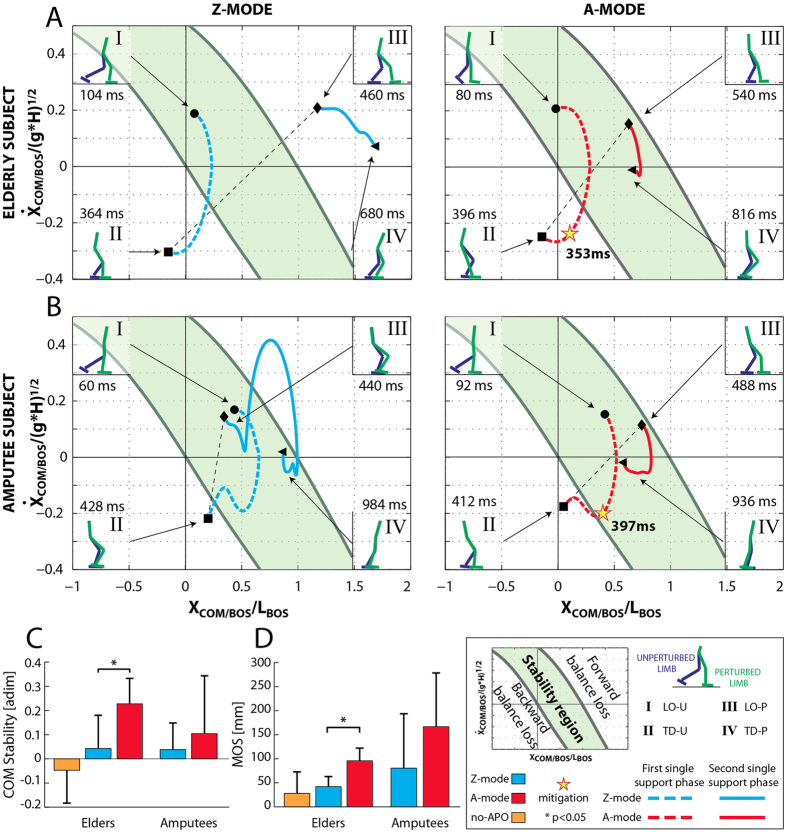
The evolution to bipedalism forced humans to develop suitable strategies for dynamically controlling their balance, ensuring stability, and preventing falling. The natural aging process and traumatic events such as lower-limb loss can alter the human ability to control stability significantly increasing the risk of fall and reducing the overall autonomy. Accordingly, there is an urgent need, from both end-users and society, for novel solutions that can counteract the lack of balance, thus preventing falls among older and fragile citizens. In this study, we show a novel ecological approach relying on a wearable robotic device (the Active Pelvis Orthosis, APO) aimed at facilitating balance recovery after unexpected slippages. Specifically, if the APO detects signs of balance loss, then it supplies counteracting torques at the hips to assist balance recovery. Experimental tests conducted on eight elderly persons and two transfemoral amputees revealed that stability against falls improved due to the "assisting when needed" behavior of the APO. Interestingly, our approach required a very limited personalization for each subject, and this makes it promising for real-life applications. Our findings demonstrate the potential of closed-loop controlled wearable robots to assist elderly and disabled subjects and to improve their quality of life.
Conflict of interest statement
N.V. and S.M. have financial interests in the company IUVO SRL, which will bring on the market an engineered version of the APO; N.V. is a co-inventor of the torsional spring adopted in the APO actuation unit.
Figures
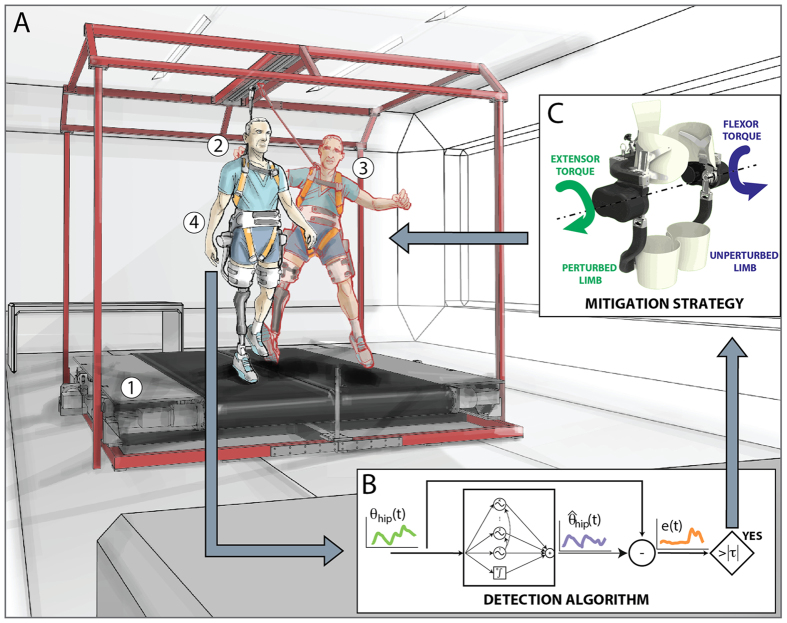
 ). (C) Once the slipping-like perturbation was detected, counteracting torques were supplied by the APO at the hip joints to promote balance recovery. Panel C was created by Arch. Alessio Tommasetti Panel C was created by Mr. Francesco Giovacchini.
). (C) Once the slipping-like perturbation was detected, counteracting torques were supplied by the APO at the hip joints to promote balance recovery. Panel C was created by Arch. Alessio Tommasetti Panel C was created by Mr. Francesco Giovacchini.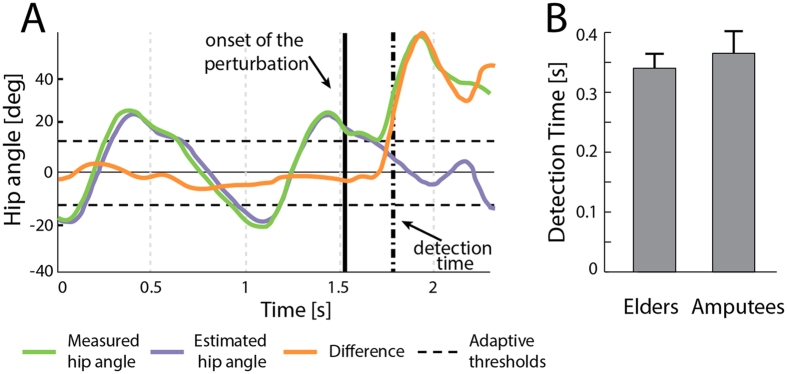
Similar articles
-
Balance and walking involvement in facioscapulohumeral dystrophy: a pilot study on the effects of custom lower limb orthoses.Eur J Phys Rehabil Med. 2013 Apr;49(2):169-78. Epub 2012 Nov 9. Eur J Phys Rehabil Med. 2013. PMID: 23138679
-
Contribution of lower limb eccentric work and different step responses to balance recovery among older adults.Gait Posture. 2015 Sep;42(3):257-62. doi: 10.1016/j.gaitpost.2015.05.014. Epub 2015 May 27. Gait Posture. 2015. PMID: 26077787
-
Understanding responses to gait instability from plantar pressure measurement and the relationship to balance and mobility in lower-limb amputees.Clin Biomech (Bristol). 2016 Feb;32:241-8. doi: 10.1016/j.clinbiomech.2015.11.004. Epub 2015 Nov 19. Clin Biomech (Bristol). 2016. PMID: 26651474
-
Regulation of angular impulse during fall recovery.J Rehabil Res Dev. 2008;45(8):1237-48. J Rehabil Res Dev. 2008. PMID: 19235123 Review.
-
Prevention of falling risk in elderly people: the relevance of muscular strength and symmetry of lower limbs in postural stability.J Strength Cond Res. 2011 Feb;25(2):567-74. doi: 10.1519/JSC.0b013e3181d32213. J Strength Cond Res. 2011. PMID: 20838253 Review.
Cited by
-
Ambulatory Assessment of the Dynamic Margin of Stability Using an Inertial Sensor Network.Sensors (Basel). 2019 Sep 23;19(19):4117. doi: 10.3390/s19194117. Sensors (Basel). 2019. PMID: 31547624 Free PMC article.
-
Age-Related Reliability of B-Mode Analysis for Tailored Exosuit Assistance.Sensors (Basel). 2023 Feb 3;23(3):1670. doi: 10.3390/s23031670. Sensors (Basel). 2023. PMID: 36772710 Free PMC article.
-
Aging does not affect the intralimb coordination elicited by slip-like perturbation of different intensities.J Neurophysiol. 2017 Sep 1;118(3):1739-1748. doi: 10.1152/jn.00844.2016. Epub 2017 Jul 12. J Neurophysiol. 2017. PMID: 28701547 Free PMC article.
-
Machine Learning Enables Rapid Detection of Slips Using a Robotic Hip Exoskeleton.IEEE Trans Med Robot Bionics. 2025 May;7(2):666-677. doi: 10.1109/tmrb.2025.3560331. Epub 2025 Apr 14. IEEE Trans Med Robot Bionics. 2025. PMID: 40837732
-
Direct biomechanical manipulation of human gait stability: A systematic review.PLoS One. 2024 Jul 11;19(7):e0305564. doi: 10.1371/journal.pone.0305564. eCollection 2024. PLoS One. 2024. PMID: 38990959 Free PMC article.
References
-
- Marigold D. S. & Misiaszek J. E. Whole-body responses: neural control and implications for rehabilitation and fall prevention. Neuroscientist 15, 36–46 (2009). - PubMed
-
- Misiaszek J. E. Neural control of walking balance: if falling then react else continue. Exercise and sport sciences reviews 34, 128–134 (2006). - PubMed
-
- Berg W. P., Alessio H. M., Mills E. M. & Tong C. Circumstances and consequences of falls in independent community-dwelling older adults. Age Ageing 26, 261–268 (1997). - PubMed
-
- Masud T. & Morris R. O. Epidemiology of falls. Age Ageing 30 Suppl 4, 3–7 (2001). - PubMed
-
- Rubenstein L. Z. Falls in older people: epidemiology, risk factors and strategies for prevention. Age Ageing 35 Suppl 2, ii37–ii41, doi: 35/suppl_2/ii37 (2006). - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
