

Correlated velocity models as a fundamental unit of animal movement: synthesis and applications
- PMID: 28496983
- PMCID: PMC5424322
- DOI: 10.1186/s40462-017-0103-3
Correlated velocity models as a fundamental unit of animal movement: synthesis and applications
Abstract
Background: Continuous time movement models resolve many of the problems with scaling, sampling, and interpretation that affect discrete movement models. They can, however, be challenging to estimate, have been presented in inconsistent ways, and are not widely used.
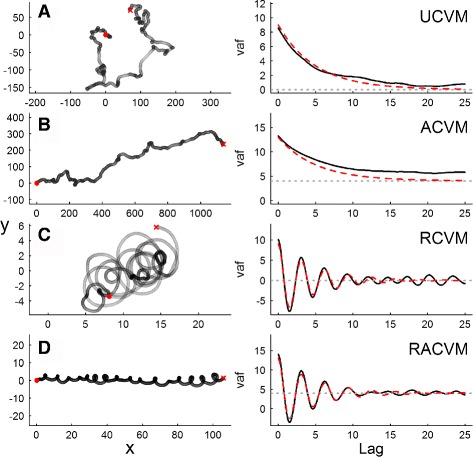
Methods: We review the literature on integrated Ornstein-Uhlenbeck velocity models and propose four fundamental correlated velocity movement models (CVM's): random, advective, rotational, and rotational-advective. The models are defined in terms of biologically meaningful speeds and time scales of autocorrelation. We summarize several approaches to estimating the models, and apply these tools for the higher order task of behavioral partitioning via change point analysis.
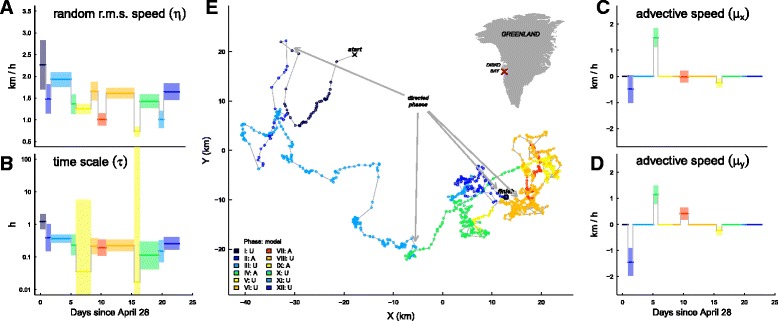
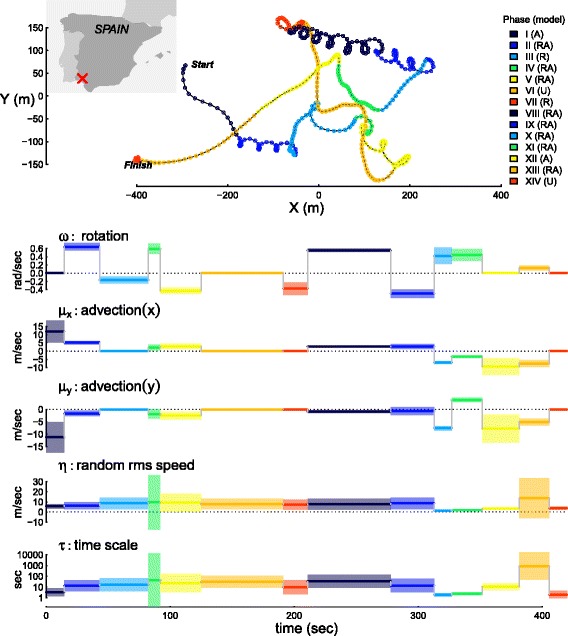
Results: An array of simulation illustrate the precision and accuracy of the estimation tools. An analysis of a swimming track of a bowhead whale (Balaena mysticetus) illustrates their robustness to irregular and sparse sampling and identifies switches between slower and faster, and directed vs. random movements. An analysis of a short flight of a lesser kestrel (Falco naumanni) identifies exact moments when switches occur between loopy, thermal soaring and directed flapping or gliding flights.
Conclusions: We provide tools to estimate parameters and perform change point analyses in continuous time movement models as an R package (smoove). These resources, together with the synthesis, should facilitate the wider application and development of correlated velocity models among movement ecologists.
Keywords: Balaena mysticetus; Correlated random walk; Correlated velocity movement; Falco naumanni; Integrated Ornstein-Uhlenbeck process; Thermal soaring; Velocity autocovariance function.
Figures

References
-
- Patlak CS. A mathematical contribution to the study of orientation of organisms. Bull Math Biophys. 1953;15:431–76. doi: 10.1007/BF02476435. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
