

A light-driven artificial flytrap
- PMID: 28534872
- PMCID: PMC5457518
- DOI: 10.1038/ncomms15546
A light-driven artificial flytrap
Abstract
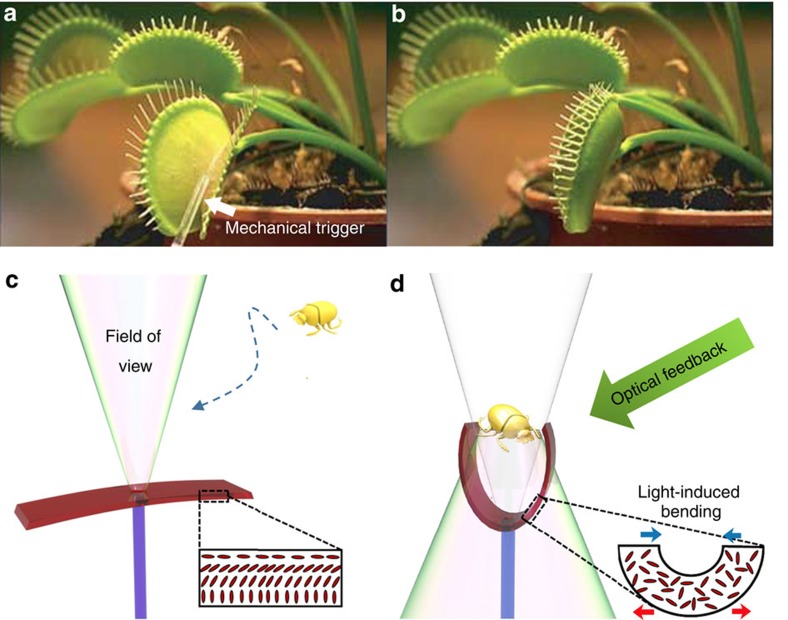
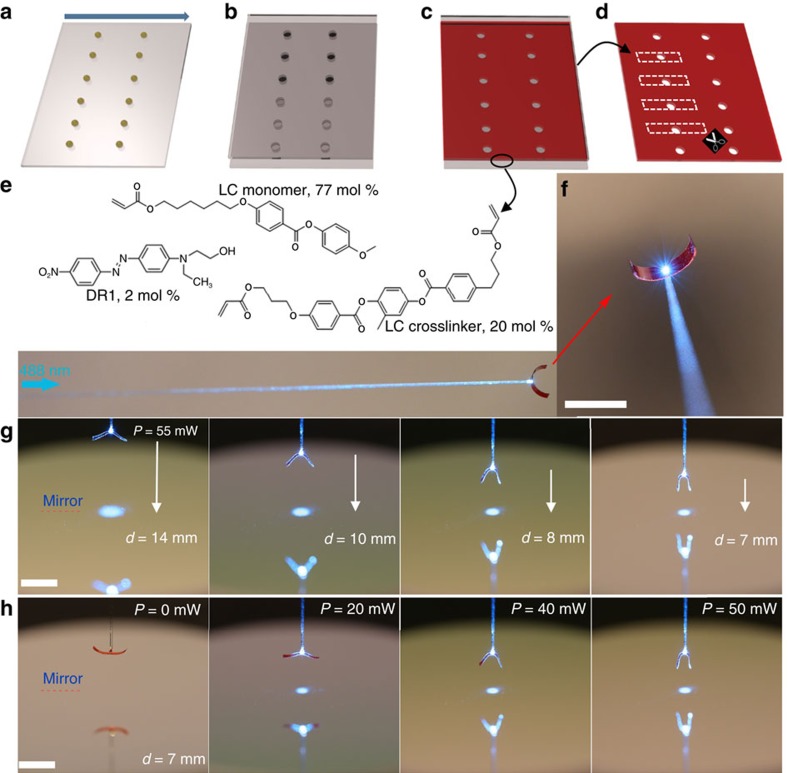
The sophistication, complexity and intelligence of biological systems is a continuous source of inspiration for mankind. Mimicking the natural intelligence to devise tiny systems that are capable of self-regulated, autonomous action to, for example, distinguish different targets, remains among the grand challenges in biomimetic micro-robotics. Herein, we demonstrate an autonomous soft device, a light-driven flytrap, that uses optical feedback to trigger photomechanical actuation. The design is based on light-responsive liquid-crystal elastomer, fabricated onto the tip of an optical fibre, which acts as a power source and serves as a contactless probe that senses the environment. Mimicking natural flytraps, this artificial flytrap is capable of autonomous closure and object recognition. It enables self-regulated actuation within the fibre-sized architecture, thus opening up avenues towards soft, autonomous small-scale devices.
Conflict of interest statement
The authors declare no competing financial interests.
Figures
References
-
- Wegst U. G. K., Bai H., Saiz E., Tomsia A. P. & Ritchie R. O. Bioinspired structural materials. Nat. Mater. 14, 23–36 (2014). - PubMed
-
- Zhao Y. et al. Progressive macromolecular self-assembly: from biomimetic chemistry to bio-inspired materials. Adv. Mater. 25, 5215–5256 (2013). - PubMed
-
- Morris E., Chavez M. & Tan C. Dynamic biomaterials: toward engineering autonomous feedback. Curr. Opin. Biotechnol. 39, 97–104 (2016). - PubMed
-
- Cully A., Clune J., Tarapore D. & Mouret J. B. Robots that can adapt like animals. Nature 521, 503–507 (2015). - PubMed
-
- Pfeifer R., Lungarella M. & Iida F. Self-organization, embodiment, and biologically inspired robotics. Science 318, 1088–1093 (2007). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
