

A muscle-driven approach to restore stepping with an exoskeleton for individuals with paraplegia
- PMID: 28558835
- PMCID: PMC5450339
- DOI: 10.1186/s12984-017-0258-6
A muscle-driven approach to restore stepping with an exoskeleton for individuals with paraplegia
Abstract
Background: Functional neuromuscular stimulation, lower limb orthosis, powered lower limb exoskeleton, and hybrid neuroprosthesis (HNP) technologies can restore stepping in individuals with paraplegia due to spinal cord injury (SCI). However, a self-contained muscle-driven controllable exoskeleton approach based on an implanted neural stimulator to restore walking has not been previously demonstrated, which could potentially result in system use outside the laboratory and viable for long term use or clinical testing. In this work, we designed and evaluated an untethered muscle-driven controllable exoskeleton to restore stepping in three individuals with paralysis from SCI.
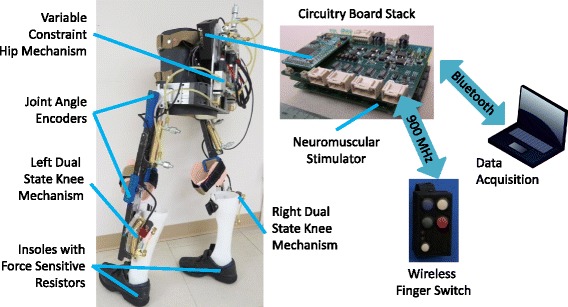
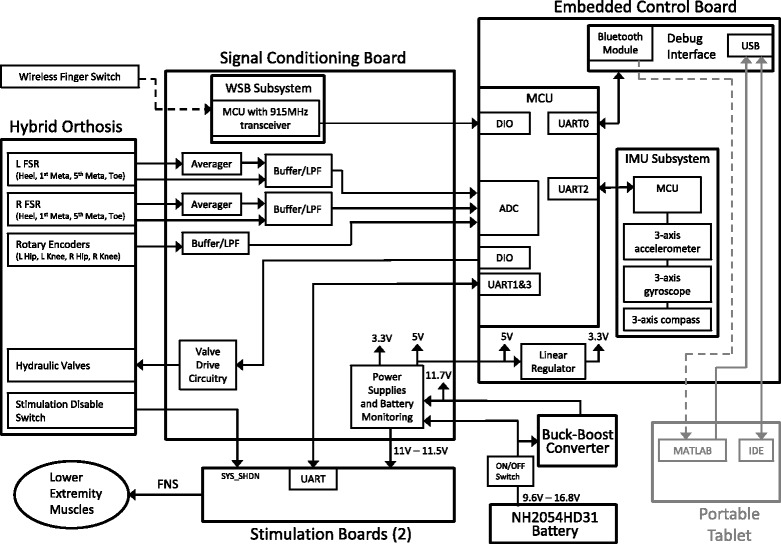
Methods: The self-contained HNP combined neural stimulation to activate the paralyzed muscles and generate joint torques for limb movements with a controllable lower limb exoskeleton to stabilize and support the user. An onboard controller processed exoskeleton sensor signals, determined appropriate exoskeletal constraints and stimulation commands for a finite state machine (FSM), and transmitted data over Bluetooth to an off-board computer for real-time monitoring and data recording. The FSM coordinated stimulation and exoskeletal constraints to enable functions, selected with a wireless finger switch user interface, for standing up, standing, stepping, or sitting down. In the stepping function, the FSM used a sensor-based gait event detector to determine transitions between gait phases of double stance, early swing, late swing, and weight acceptance.
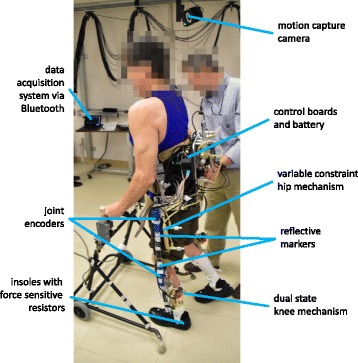
Results: The HNP restored stepping in three individuals with motor complete paralysis due to SCI. The controller appropriately coordinated stimulation and exoskeletal constraints using the sensor-based FSM for subjects with different stimulation systems. The average range of motion at hip and knee joints during walking were 8.5°-20.8° and 14.0°-43.6°, respectively. Walking speeds varied from 0.03 to 0.06 m/s, and cadences from 10 to 20 steps/min.
Conclusions: A self-contained muscle-driven exoskeleton was a feasible intervention to restore stepping in individuals with paraplegia due to SCI. The untethered hybrid system was capable of adjusting to different individuals' needs to appropriately coordinate exoskeletal constraints with muscle activation using a sensor-driven FSM for stepping. Further improvements for out-of-the-laboratory use should include implantation of plantar flexor muscles to improve walking speed and power assist as needed at the hips and knees to maintain walking as muscles fatigue.
Keywords: Assistive technology; Biomechanics; Exoskeleton; Finite state machine; Functional neuromuscular stimulation; Gait; Hybrid neuroprosthesis; Spinal cord injury.
Figures





References
-
- Kobetic R, Marsolais EB. Synthesis of paraplegic gait with multichannel functional neuromuscular stimulation. IEEE Trans Rehabil Eng. 1994;2(2):66–79. doi: 10.1109/86.313148. - DOI
-
- Marsolais EB, Kobetic R. Development of a practical electrical stimulation system for restoring gait in the paralyzed patient. Clin Orthop Relat Res. 1988;233:64–74. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
