

Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion
- PMID: 28587178
- PMCID: PMC5492902
- DOI: 10.3390/s17061257
Survey of Motion Tracking Methods Based on Inertial Sensors: A Focus on Upper Limb Human Motion
Abstract
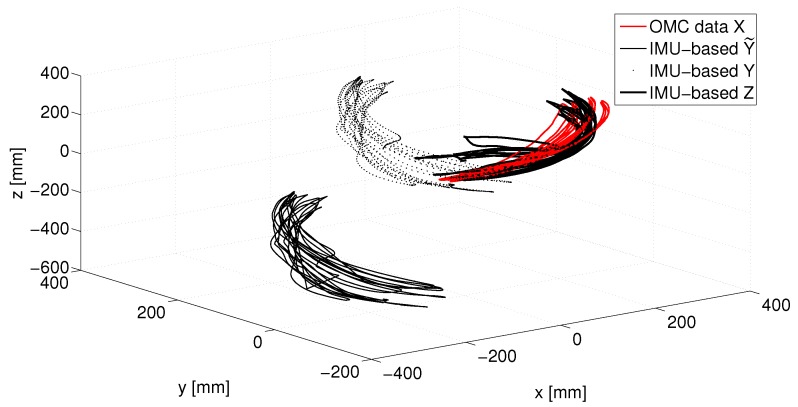
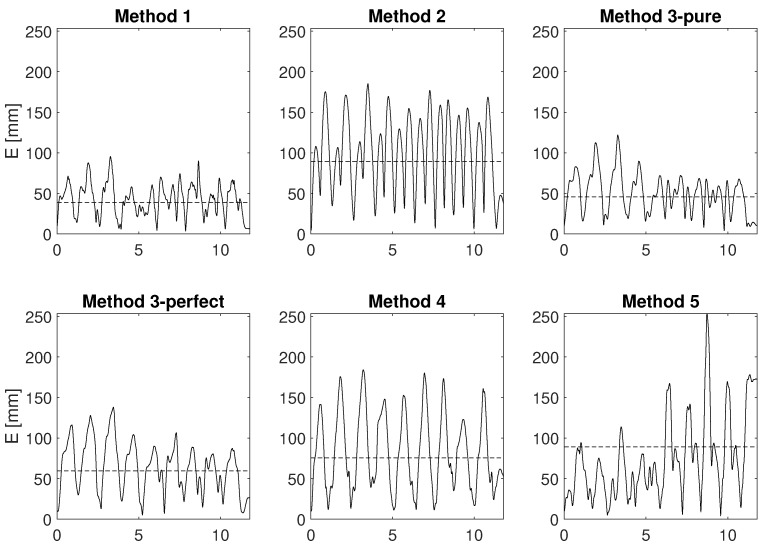
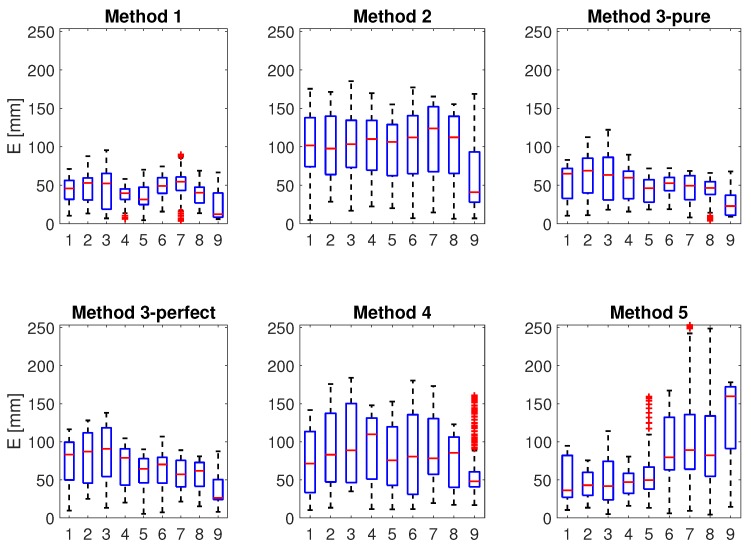
Motion tracking based on commercial inertial measurements units (IMUs) has been widely studied in the latter years as it is a cost-effective enabling technology for those applications in which motion tracking based on optical technologies is unsuitable. This measurement method has a high impact in human performance assessment and human-robot interaction. IMU motion tracking systems are indeed self-contained and wearable, allowing for long-lasting tracking of the user motion in situated environments. After a survey on IMU-based human tracking, five techniques for motion reconstruction were selected and compared to reconstruct a human arm motion. IMU based estimation was matched against motion tracking based on the Vicon marker-based motion tracking system considered as ground truth. Results show that all but one of the selected models perform similarly (about 35 mm average position estimation error).
Keywords: inertial measurements units; kinematics; motion tracking; sensor fusion.
Conflict of interest statement
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
Figures

References
-
- Fortino G., Giannantonio R., Gravina R., Kuryloski P., Jafari R. Enabling effective programming and flexible anagement of efficient body sensor network applications. IEEE Trans. Hum.-Mach. Syst. 2013;43:115–133. doi: 10.1109/TSMCC.2012.2215852. - DOI
-
- Chen M., Gonzalez S., Vasilakos A., Cao H., Leung V.C. Body area networks: A survey. Mob. Netw. Appl. 2011;16:171–193. doi: 10.1007/s11036-010-0260-8. - DOI
-
- Lefferts E.J., Markley F.L., Shuster M.D. Kalman filtering for spacecraft attitude estimation. J. Guid. Control Dyn. 1982;5:417–429. doi: 10.2514/3.56190. - DOI
-
- Shuster M.D., Oh S.D. Three-axis attitude determination from vector observations. J. Guid. Control Dyn. 1981;4:70–77. doi: 10.2514/3.19717. - DOI
-
- Choi S., Do J., Hwang B., Lee J. Static attitude control for underwater robots using multiple ballast tanks. IEEJ Trans. Electr. Electron. Eng. 2014;9:S49–S55. doi: 10.1002/tee.22032. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
