

Calibration of Magnetometers with GNSS Receivers and Magnetometer-Aided GNSS Ambiguity Fixing
- PMID: 28594369
- PMCID: PMC5492446
- DOI: 10.3390/s17061324
Calibration of Magnetometers with GNSS Receivers and Magnetometer-Aided GNSS Ambiguity Fixing
Abstract
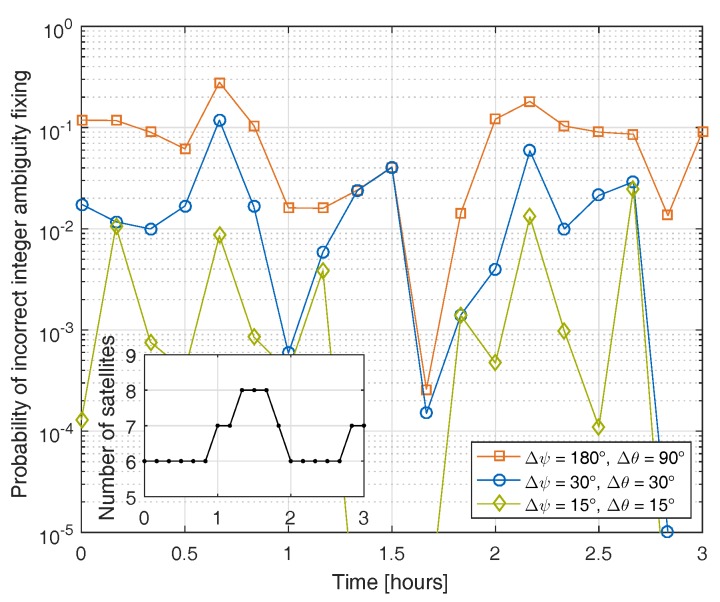
Magnetometers provide compass information, and are widely used for navigation, orientation and alignment of objects. As magnetometers are affected by sensor biases and eventually by systematic distortions of the Earth magnetic field, a calibration is needed. In this paper, a method for calibration of magnetometers with three Global Navigation Satellite System (GNSS) receivers is presented. We perform a least-squares estimation of the magnetic flux and sensor biases using GNSS-based attitude information. The attitude is obtained from the relative positions between the GNSS receivers in the North-East-Down coordinate frame and prior knowledge of these relative positions in the platform's coordinate frame. The relative positions and integer ambiguities of the periodic carrier phase measurements are determined with an integer least-squares estimation using an integer decorrelation and sequential tree search. Prior knowledge on the relative positions is used to increase the success rate of ambiguity fixing. We have validated the proposed method with low-cost magnetometers and GNSS receivers on a vehicle in a test drive. The calibration enabled a consistent heading determination with an accuracy of five degrees. This precise magnetometer-based attitude information allows an instantaneous GNSS integer ambiguity fixing.
Keywords: attitude determination; calibration; carrier phase; magnetometer; satellite navigation.
Conflict of interest statement
The author declares no conflict of interest.
Figures






References
-
- Teunissen P. The least-squares ambiguity decorrelation adjustment: A method for fast GPS ambiguity estimation. J. Geod. 1995;70:65–82. doi: 10.1007/BF00863419. - DOI
-
- Teunissen P. The LAMBDA method for the GNSS compass. Artif. Satell. 2006;41:89–103. doi: 10.2478/v10018-007-0009-1. - DOI
-
- Teunissen P. Integer least-squares theory for the GNSS compass. J. Geod. 2010;84:433–447. doi: 10.1007/s00190-010-0380-8. - DOI
-
- Henkel P., Günther C. Reliable Integer Ambiguity Resolution: Multi-Frequency Code Carrier Linear Combinations and Statistical A Priori Knowledge of Attitude. Navigation. 2012;59:61–75. doi: 10.1002/navi.6. - DOI
-
- Henkel P., Berthold P., Kiam J. Calibration of Magnetic Field Sensors with Two Mass-Market GNSS Receivers; Proceedings of the IEEE Workshop on Positioning, Navigation and Communication (WPNC); Dresden, Germany. 12–13 March 2014; p. 5.
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
