

Review
doi: 10.1016/j.neuron.2017.05.025.
Neural Manifolds for the Control of Movement
Affiliations
- PMID: 28595054
- PMCID: PMC6122849
- DOI: 10.1016/j.neuron.2017.05.025
Item in Clipboard
Review
Neural Manifolds for the Control of Movement
Neuron.
.
Abstract
The analysis of neural dynamics in several brain cortices has consistently uncovered low-dimensional manifolds that capture a significant fraction of neural variability. These neural manifolds are spanned by specific patterns of correlated neural activity, the "neural modes." We discuss a model for neural control of movement in which the time-dependent activation of these neural modes is the generator of motor behavior. This manifold-based view of motor cortex may lead to a better understanding of how the brain controls movement.
Copyright © 2017 Elsevier Inc. All rights reserved.
Figures
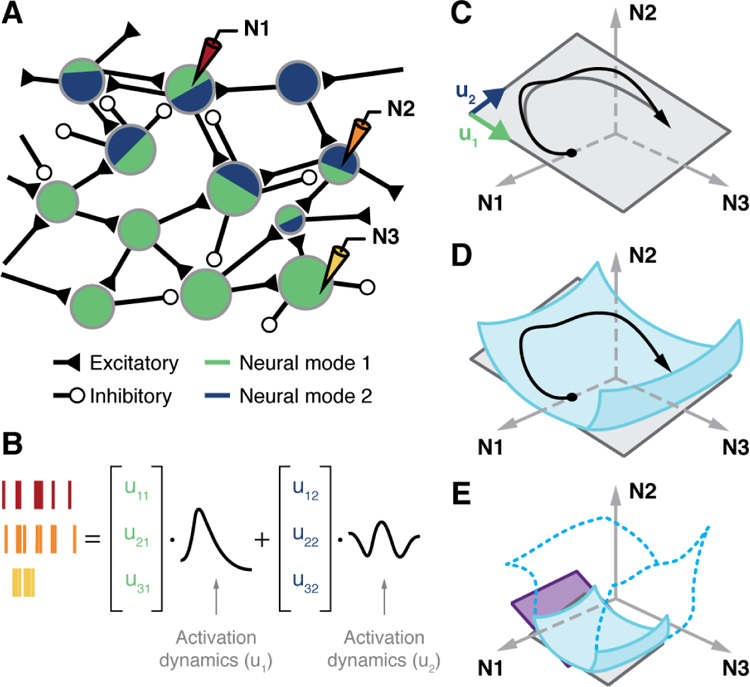
A) Latent variables as a generative model for population activity. The relative area of the blue/green regions in each neuron represents the magnitude of the contribution of each latent variable to the neuron’s activity. B) Spikes from three recorded neurons during task execution as a linear combination of two latent variables. C) Trajectory of time-varying population activity in the neural space of the three recorded neurons (black). The trajectory is mostly confined to the neural manifold, a plane shown in gray, spanned by the neural modes u1 and u2. D) A curved, nonlinear neural manifold, shown in blue. Linear methods would capture a flat, local approximation to a small task-specific region of the manifold. E) Linear manifolds for two different tasks shown as gray and purple planes. Are these two planes local linear approximations to different regions within a large, continuous manifold (transparent surface with blue contour), or are they distinct task-specific manifolds that may or not share neural modes?
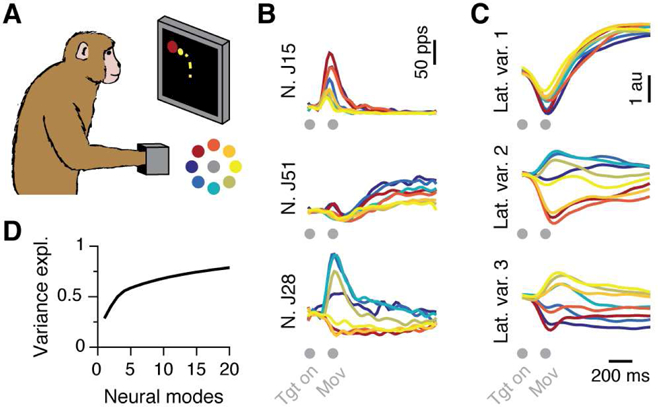
A) Monkey performing an isometric eight-target center-out wrist task. The targets are color coded (inset). The same target color code is used for the curves shown in panels B and C. B) Peristimulus time histogram for three out of the 68 neurons recorded in a single session. C) Latent variables track the activation of the three leading neural modes, identified with PCA. In panels B and C, target presentation (“Tgt on”) is followed by movement onset (“Mov”) after about 140 ms. D) Variance explained as function of the number of PCA neural modes. Ten modes sufficed to account for about 70% of the variance.
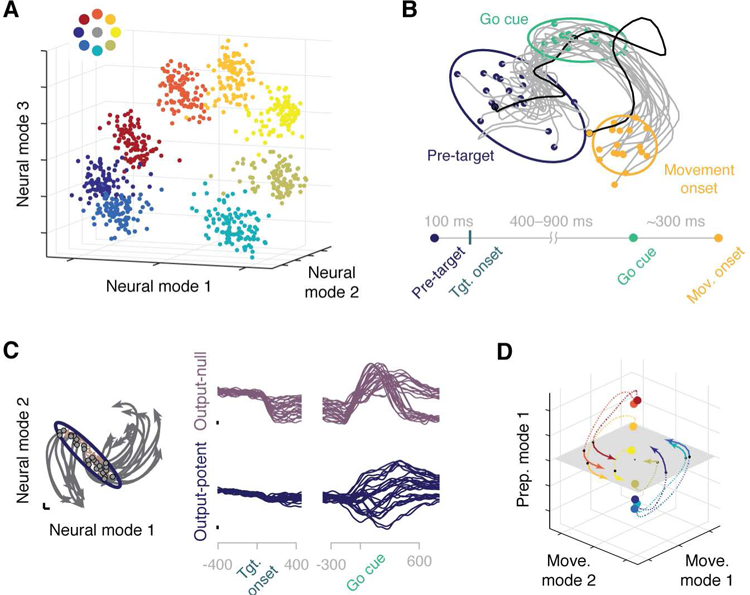
A) Preparatory activity in PMd for an eight-target reach task. A neural manifold spanned by three neural modes reveals target-specific clusters. The targets are color coded (inset). Each point represents activity measured during the delay period for one trial. Adapted from (Santhanam et al., 2009). B) Population variability in PMd is reduced by stimulus presentation. For a delayed reach task (timeline at bottom of panel), population activity trajectories for individual trials are shown in gray in a twodimensional manifold. The “Pre-target” confidence ellipsoid shrinks during “Go cue”, as trajectories get closer together. Adapted from (Churchland et al., 2010b). C) The null space allows for movement preparation without execution. Population activity trajectories for each reach condition are shown in gray in a two-dimensional manifold. Preparatory activity sets the corresponding initial conditions (gray circles within purple ellipsoid). Null (purple, top) and potent (dark blue, bottom) latent variables, defined with respect to EMG activity, are shown on the right. Adapted from (Kaufman et al., 2014). D) Neural modes associated with movement preparation and execution span different manifolds. Two movement modes span a plane (in gray), while the orthogonal preparation mode spans a line that contains the initial conditions (colored circles). Projections of the full trajectories onto the movement manifold resemble the traces in panel C. Trajectories are color coded for each target, as per panel A. Adapted from (Elsayed et al., 2016).
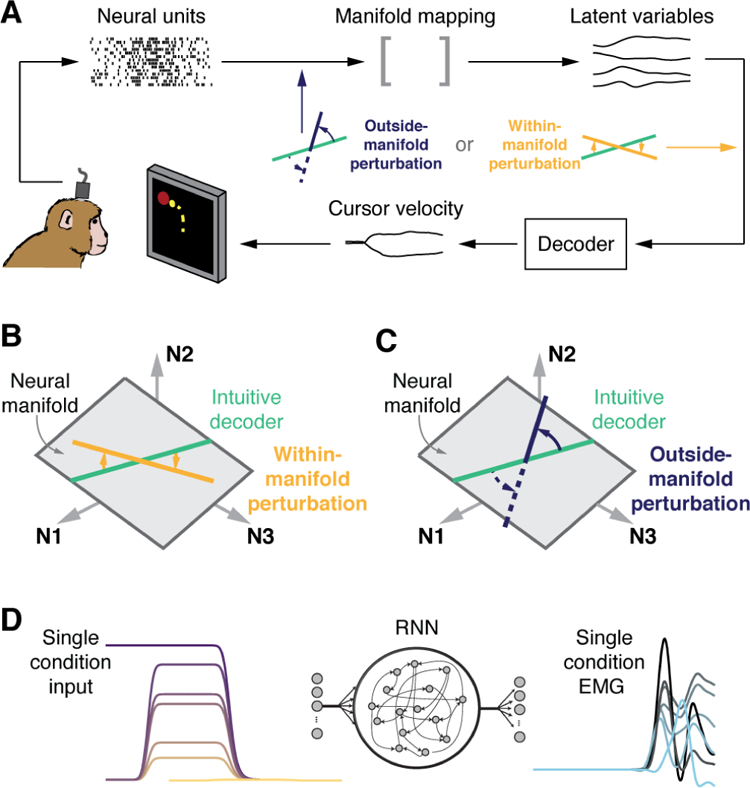
A) Existing neural modes facilitate the adaptation to variations of a learned task. In a BMI paradigm, ten latent variables representing the recorded activity of M1 neurons were mapped onto x and y components of cursor velocity. Once monkeys were proficient with the BMI, a B) within-manifold or C) outside-manifold perturbation was imposed on the decoder inputs. Adaptation to B required a change in the relative activation of existing neural modes, while C required the acquisition of new neural modes through changes in neural comodulation patterns. Adapted from (Sadtler et al., 2014). D) A recurrent neural network was trained to generate condition-specific EMG patterns selected through inputs representing preparatory activity. The latent variables that described the population activity of the trained recurrent network closely resembled those associated with the experimental data. Adapted from (Sussillo et al., 2015).
References
-
- Chapin JK, Nicolelis MAL, 1999. Principal component analysis of neuronal ensemble activity reveals multidimensional somatosensory representations. J. Neurosci. Methods 94, 121–140. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
