

Development and Positioning Accuracy Assessment of Single-Frequency Precise Point Positioning Algorithms by Combining GPS Code-Pseudorange Measurements with Real-Time SSR Corrections
- PMID: 28598403
- PMCID: PMC5492347
- DOI: 10.3390/s17061347
Development and Positioning Accuracy Assessment of Single-Frequency Precise Point Positioning Algorithms by Combining GPS Code-Pseudorange Measurements with Real-Time SSR Corrections
Abstract
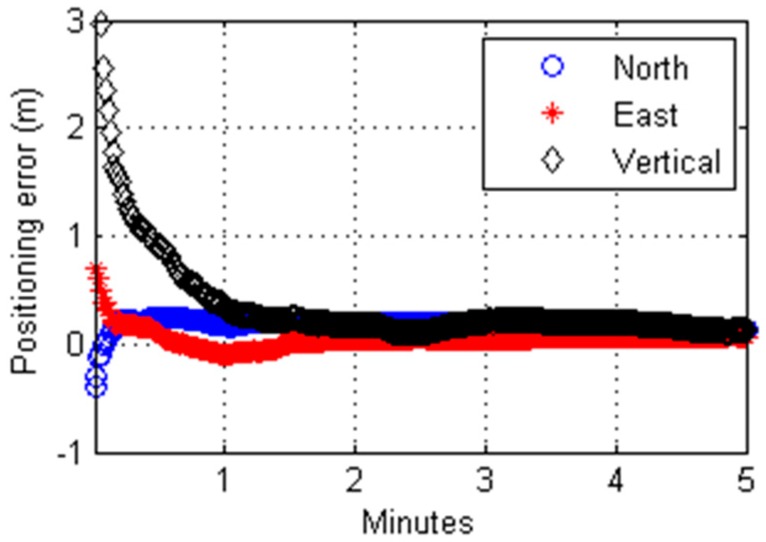
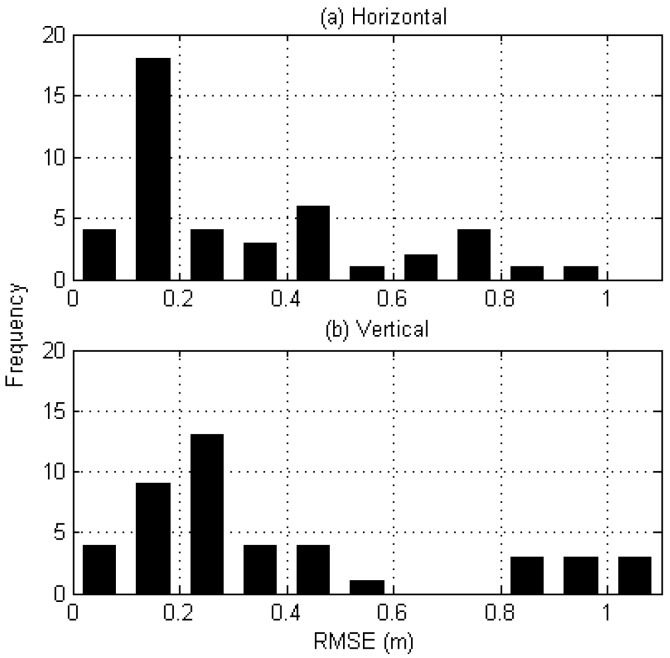
We have developed a suite of real-time precise point positioning programs to process GPS pseudorange observables, and validated their performance through static and kinematic positioning tests. To correct inaccurate broadcast orbits and clocks, and account for signal delays occurring from the ionosphere and troposphere, we applied State Space Representation (SSR) error corrections provided by the Seoul Broadcasting System (SBS) in South Korea. Site displacements due to solid earth tide loading are also considered for the purpose of improving the positioning accuracy, particularly in the height direction. When the developed algorithm was tested under static positioning, Kalman-filtered solutions produced a root-mean-square error (RMSE) of 0.32 and 0.40 m in the horizontal and vertical directions, respectively. For the moving platform, the RMSE was found to be 0.53 and 0.69 m in the horizontal and vertical directions.
Keywords: GPS; PPP; SSR; navigation; pseudorange.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Wübbena G., Schmitz M., Bagge A. PPP-RTK: Precise Point Positioning using State-Space Representation in RTK Networks; Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005); Long Beach, CA, USA. 13–16 September 2005.
-
- Choy S., Bisnath S., Rizos C. Uncovering common misconceptions in GNSS Precise Point Positioning and its future prospect. GPS Solut. 2017;21:13–22. doi: 10.1007/s10291-016-0545-x. - DOI
-
- Webb F.H., Zumberge J.F. An Introduction to the GIPSY/OASIS-Ⅱ. JPL Publication D-11088; Pasadena, CA, USA: 1993.
-
- Hadas T., Bosy J. IGS-RTS Precise Orbits and Clocks Verification and Quality Degradation over Time. GPS Solut. 2014;19:93–105. doi: 10.1007/s10291-014-0369-5. - DOI
-
- Won J.H. Ph.D. Thesis. Inha University; Incheon, Korea: 2015. Development of PPP-RTK Algorithms for Moving Platforms Using Combined GPS/GLONASS Measurements.
LinkOut - more resources
Full Text Sources
Other Literature Sources
