

Prediction of Driver's Intention of Lane Change by Augmenting Sensor Information Using Machine Learning Techniques
- PMID: 28604582
- PMCID: PMC5492813
- DOI: 10.3390/s17061350
Prediction of Driver's Intention of Lane Change by Augmenting Sensor Information Using Machine Learning Techniques
Abstract
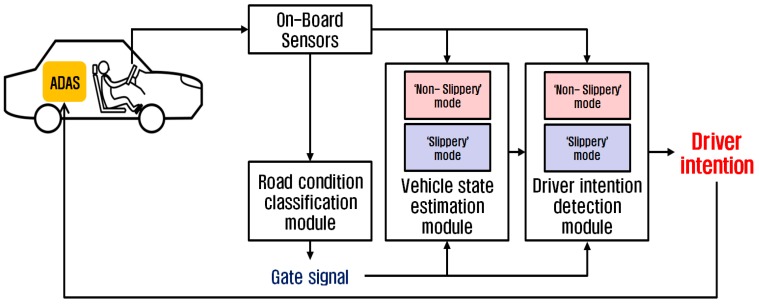
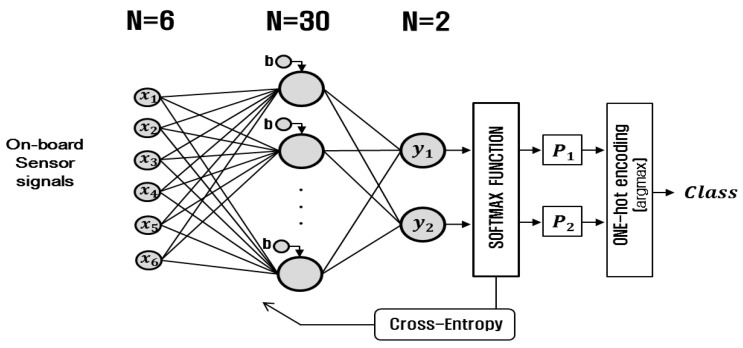
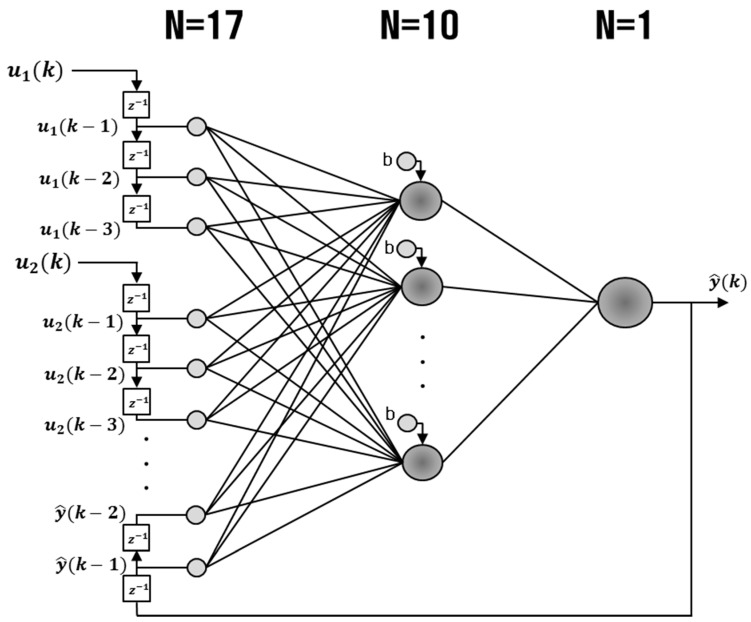
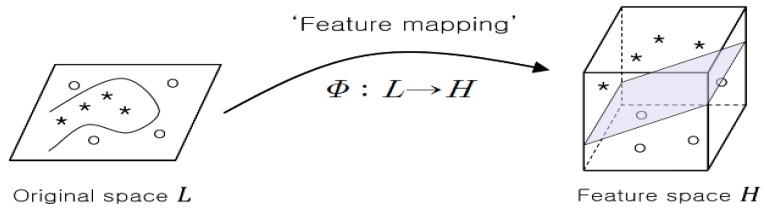
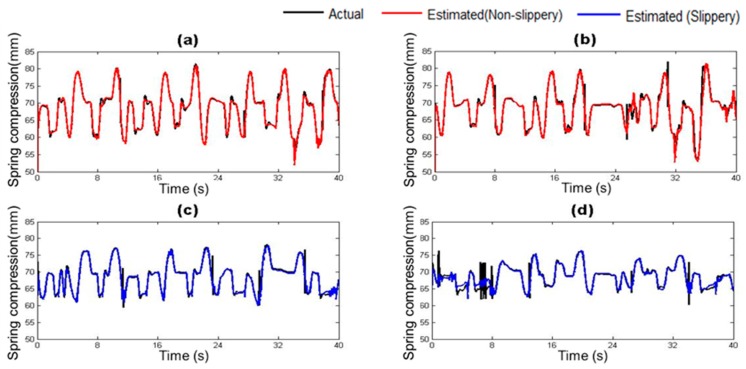
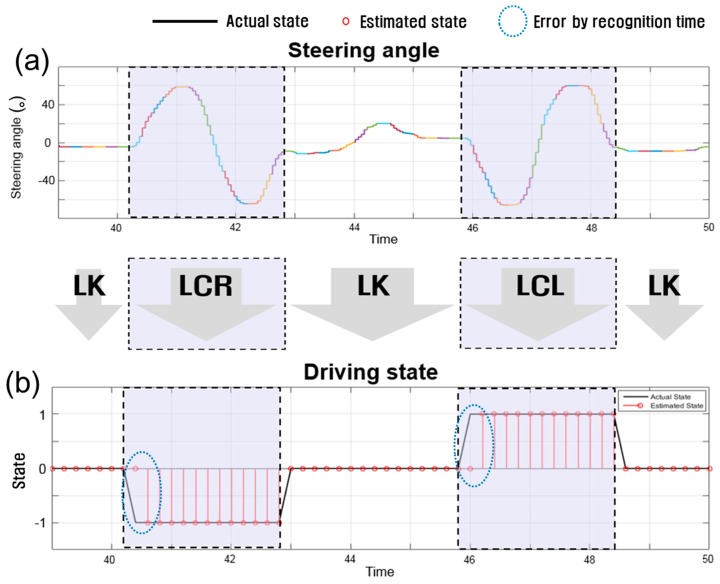
Driver assistance systems have become a major safety feature of modern passenger vehicles. The advanced driver assistance system (ADAS) is one of the active safety systems to improve the vehicle control performance and, thus, the safety of the driver and the passengers. To use the ADAS for lane change control, rapid and correct detection of the driver's intention is essential. This study proposes a novel preprocessing algorithm for the ADAS to improve the accuracy in classifying the driver's intention for lane change by augmenting basic measurements from conventional on-board sensors. The information on the vehicle states and the road surface condition is augmented by using an artificial neural network (ANN) models, and the augmented information is fed to a support vector machine (SVM) to detect the driver's intention with high accuracy. The feasibility of the developed algorithm was tested through driving simulator experiments. The results show that the classification accuracy for the driver's intention can be improved by providing an SVM model with sufficient driving information augmented by using ANN models of vehicle dynamics.
Keywords: advanced driver assistance system (ADAS); artificial neural network (ANN); driver’s intention; lane change; support vector machine (SVM).
Conflict of interest statement
The authors declare no conflict of interest.
Figures






References
-
- Hou H., Jin L., Niu Q., Sun Y., Lu M. Driver intention recognition method using continuous hidden markov model. Int. J. Comput. Intell. Syst. 2011;4:386–393. doi: 10.1080/18756891.2011.9727797. - DOI
-
- Tomar R.S., Verma S., Tomar G.S. Prediction of lane change trajectories through neural network; Proceedings of the 2010 International Conference on Computational Intelligence and Communication Networks; Bhopal, India. 26–28 November 2010; pp. 249–253.
-
- FARS Encyclopedia Vehicles Involved in Single- and Two-Vehicle Fatal Crashes by Vehicle Maneuver. National Highway Traffic Safety Administration. [(accessed on 15 September 2016)]; Available online: http://www-fars. nhtsa.dot.gov/Vehicles/ VehiclesAllVehicles.aspx.
-
- Kuge N., Yamamura T., Shimoyama O., Liu A. A Driver Behavior Recognition Method Based on a Driver Model Framework. Delphi Automotive Systems; Gillingham, UK: Mar, 2000.
-
- Jin L.S., Hou H.J., Jiang Y.Y. Driver intention recognition based on continuous hidden markov model; Proceedings of the International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE); Changchun, China. 16–18 December 2011.
LinkOut - more resources
Full Text Sources
Other Literature Sources
