

Light controlled 3D micromotors powered by bacteria
- PMID: 28656975
- PMCID: PMC5493761
- DOI: 10.1038/ncomms15974
Light controlled 3D micromotors powered by bacteria
Abstract
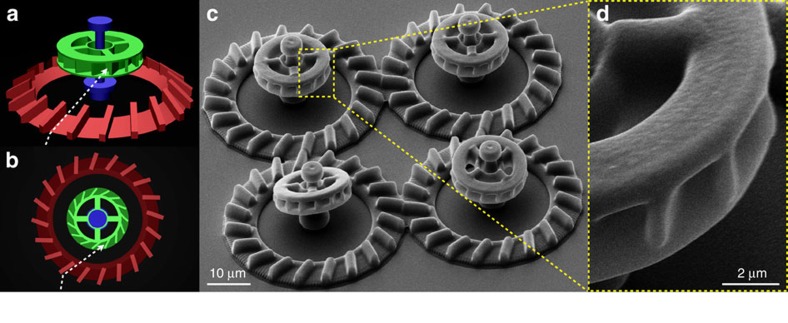
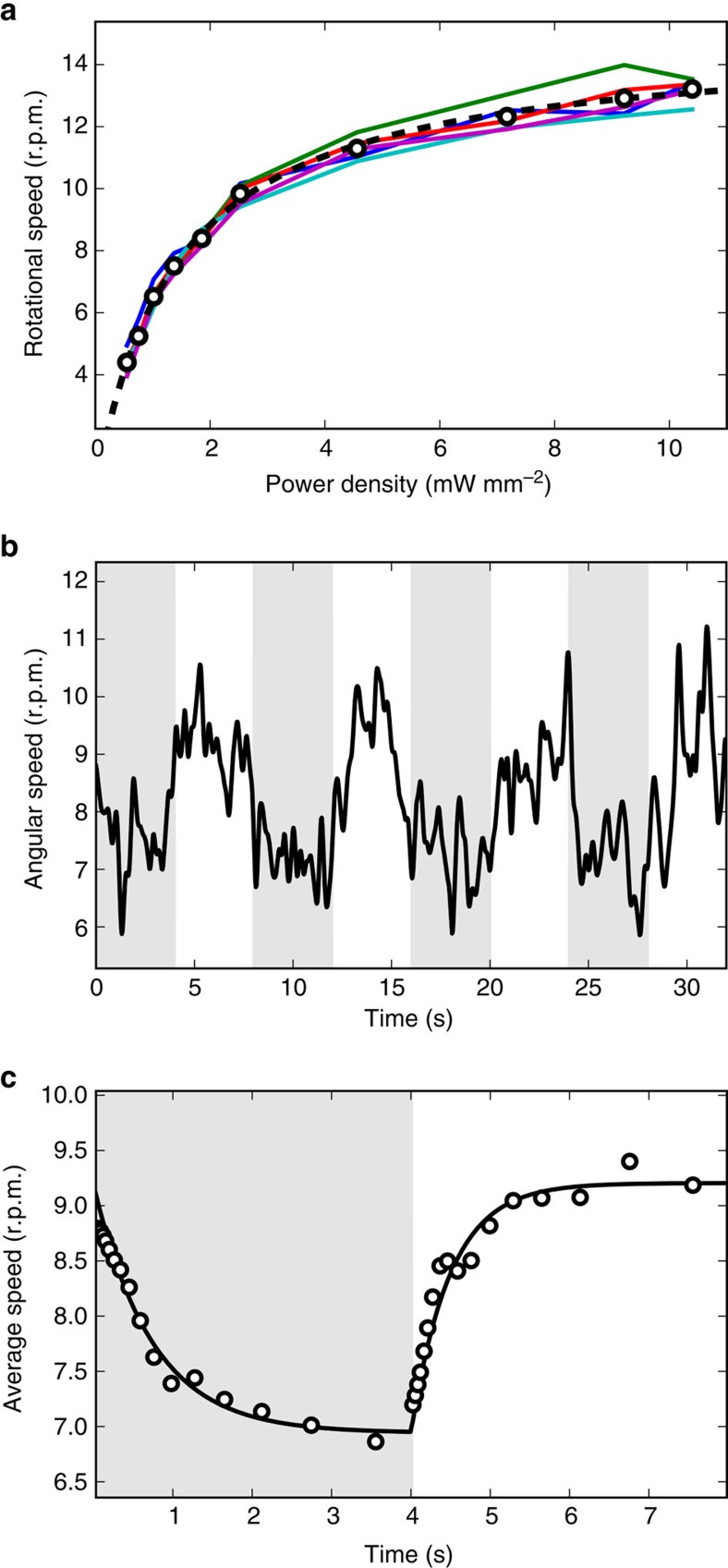
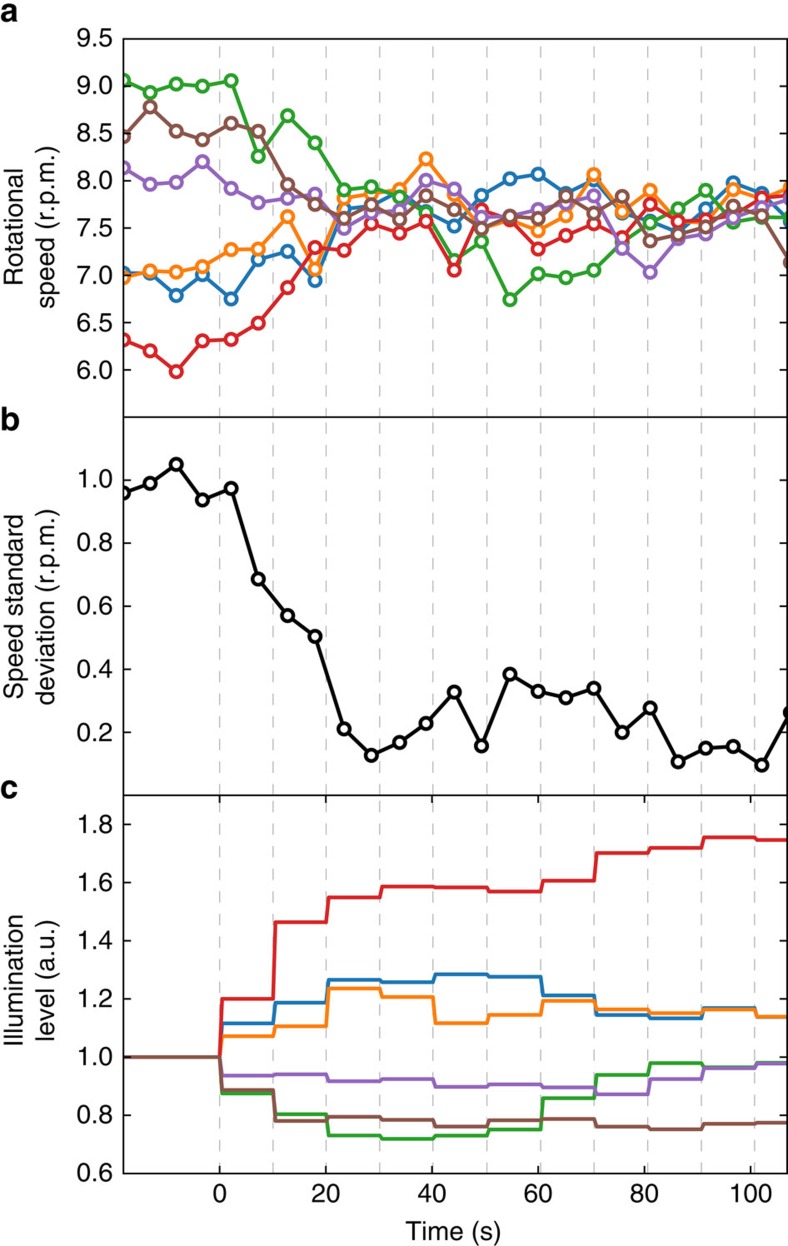
Self-propelled bacteria can be integrated into synthetic micromachines and act as biological propellers. So far, proposed designs suffer from low reproducibility, large noise levels or lack of tunability. Here we demonstrate that fast, reliable and tunable bio-hybrid micromotors can be obtained by the self-assembly of synthetic structures with genetically engineered biological propellers. The synthetic components consist of 3D interconnected structures having a rotating unit that can capture individual bacteria into an array of microchambers so that cells contribute maximally to the applied torque. Bacterial cells are smooth swimmers expressing a light-driven proton pump that allows to optically control their swimming speed. Using a spatial light modulator, we can address individual motors with tunable light intensities allowing the dynamic control of their rotational speeds. Applying a real-time feedback control loop, we can also command a set of micromotors to rotate in unison with a prescribed angular speed.
Conflict of interest statement
The authors declare no competing financial interests.
Figures
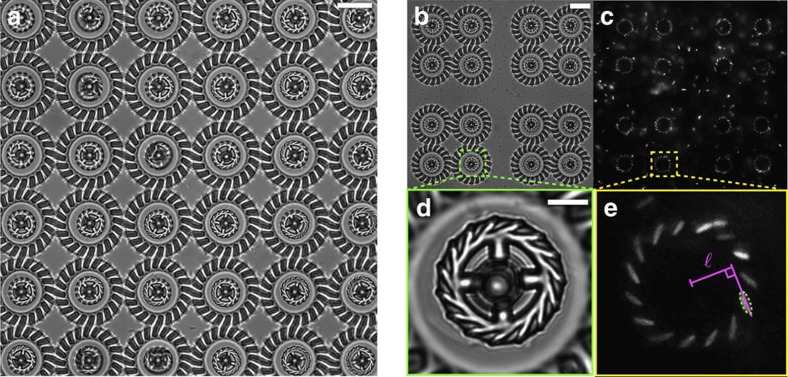
 . The scale bar is 5 μm for both d,e.
. The scale bar is 5 μm for both d,e.
References
-
- Bechinger C. et al. Active particles in complex and crowded environments. Rev. Mod. Phys. 88, 045006 (2016).
-
- Marchetti M. et al. Hydrodynamics of soft active matter. Rev. Mod. Phys. 85, 1143 (2013).
-
- Cates M. Diffusive transport without detailed balance in motile bacteria: does microbiology need statistical physics? Rep. Prog. Phys. 75, 042601 (2012). - PubMed
-
- Behkam B. & Sitti M. Bacterial flagella-based propulsion and on/off motion control of microscale objects. Appl. Phys. Lett. 90, 023902 (2007).
-
- Steager E. et al. Control of microfabricated structures powered by flagellated bacteria using phototaxis. Appl. Phys. Lett. 90, 263901 (2007).
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
