

Video-tactile pneumatic sensor for soft tissue elastic modulus estimation
- PMID: 28764711
- PMCID: PMC5539932
- DOI: 10.1186/s12938-017-0390-3
Video-tactile pneumatic sensor for soft tissue elastic modulus estimation
Abstract
Background: A new sensor for estimating elasticity of soft tissues such as a liver was developed for minimally invasive surgery application.
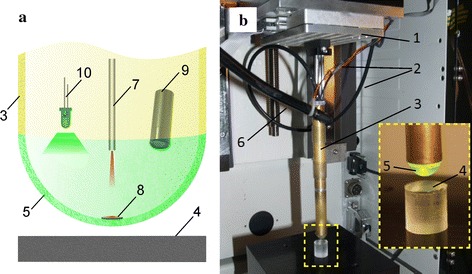
Methods: By measuring deformation and adjusting internal pressure of the pneumatic sensor head, the sensor can be used to do palpation (indentation) of tissues with wide range of stiffness. A video camera installed within the sensor shell is used to register the radius of the contact area. Based on finite element model simulations and the measured data, elastic modulus of the indented soft tissue can be calculated.
Results and conclusions: Three phantom materials, namely plastic, silicone and gelatin, with varied stiffness were tested. The experimental results demonstrated that the new sensor can obtain highly reliable data with error less than 5%. The new sensor might be served as an instrument in laparoscopic surgery for diagnosis of pathological tissues or internal organs.
Keywords: Indentation; Laparoscopy; Minimally invasive surgery; Tactile sensor; Young’s modulus.
Figures






References
-
- Shung KK. Diagnostic ultrasound: past, present, and future. J Med Biol Eng. 2011;31:371–374. doi: 10.5405/jmbe.871. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
