

Incorporating the length-dependent passive-force generating muscle properties of the extrinsic finger muscles into a wrist and finger biomechanical musculoskeletal model
- PMID: 28774467
- PMCID: PMC5597339
- DOI: 10.1016/j.jbiomech.2017.06.026
Incorporating the length-dependent passive-force generating muscle properties of the extrinsic finger muscles into a wrist and finger biomechanical musculoskeletal model
Abstract
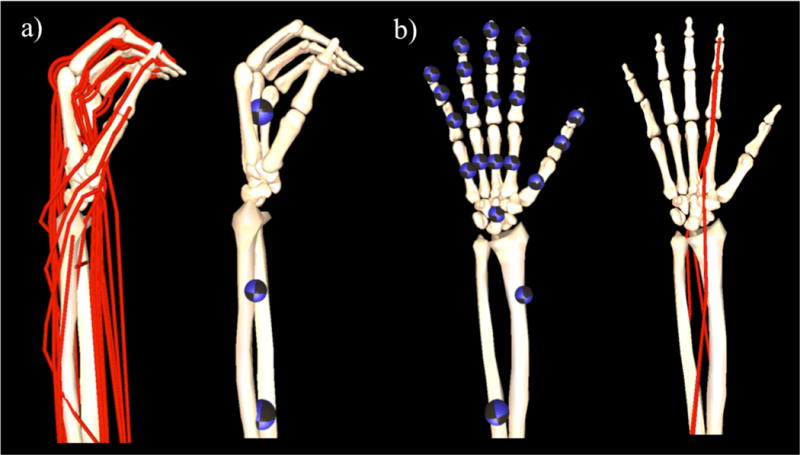
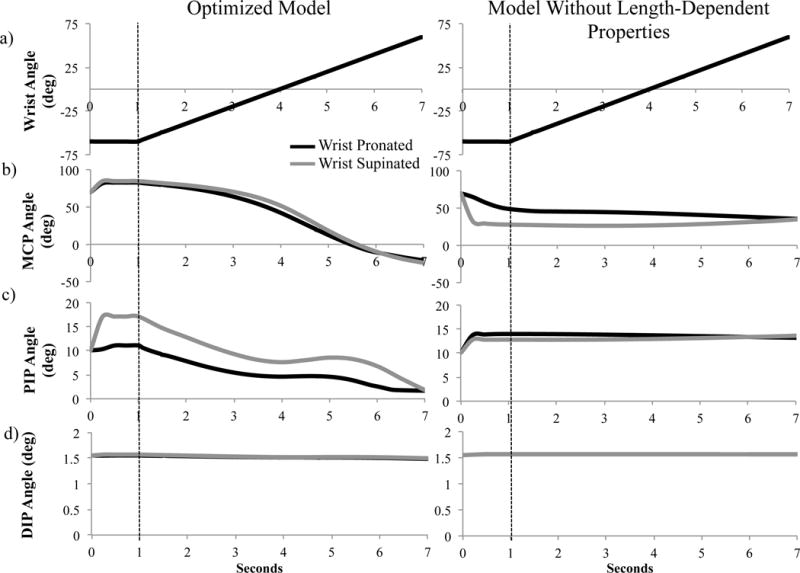
Dynamic movement trajectories of low mass systems have been shown to be predominantly influenced by passive viscoelastic joint forces and torques compared to momentum and inertia. The hand is comprised of 27smallmass segments. Because of the influence of the extrinsic finger muscles, the passive torques about each finger joint become a complex function dependent on the posture of multiple joints of the distal upper limb. However, biomechanical models implemented for the dynamic simulation of hand movements generally don't extend proximally to include the wrist and distal upper limb. Thus, they cannot accurately represent these complex passive torques. The purpose of this short communication is to both describe a method to incorporate the length-dependent passive properties of the extrinsic index finger muscles into a biomechanical model of the upper limb and to demonstrate their influence on combined movement of the wrist and fingers. Leveraging a unique set of experimental data, that describes the net passive torque contributed by the extrinsic finger muscles about the metacarpophalangeal joint of the index finger as a function of both metacarpophalangeal and wrist postures, we simulated the length-dependent passive properties of the extrinsic finger muscles. Dynamic forward simulations demonstrate that a model including these properties passively exhibits coordinated movement between the wrist and finger joints, mimicking tenodesis, a behavior that is absent when the length-dependent properties are removed. This work emphasizes the importance of incorporating the length-dependent properties of the extrinsic finger muscles into biomechanical models to study healthy and impaired hand movements.
Keywords: Extrinsic finger muscles; Finger; Hand; Musculoskeletal modeling; Passive torque; Wrist.
Published by Elsevier Ltd.
Conflict of interest statement
None
Figures
References
-
- Adamczyk MM, Crago PE. Simulated feedforward neural network coordination of hand grasp and wrist angle in a neuroprosthesis. Ieee T Rehabil Eng. 2000;8:297–304. - PubMed
-
- Babikian S, Valero-Cuevas FJ, Kanso E. Slow Movements of Bio-Inspired Limbs. J Nonlinear Sci. 2016;26:1293–1309.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
