

Experimental Investigation of the Effect of the Driving Voltage of an Electroadhesion Actuator
- PMID: 28788114
- PMCID: PMC5455829
- DOI: 10.3390/ma7074963
Experimental Investigation of the Effect of the Driving Voltage of an Electroadhesion Actuator
Abstract
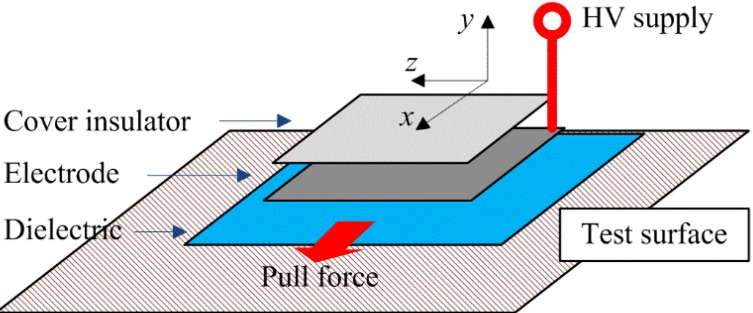
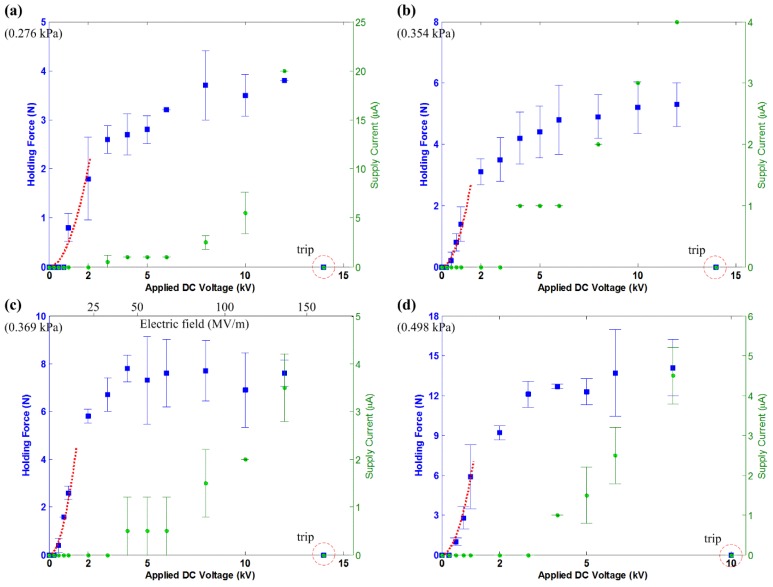
This paper investigates the effect of driving voltage on the attachment force of an electroadhesion actuator, as the existing literature on the saturation of the adhesive force at a higher electric field is incomplete. A new type of electroadhesion actuator using normally available materials, such as aluminum foil, PVC tape and a silicone rubber sheet used for keyboard protection, has been developed with a simple layered structure that is capable of developing adhesive force consistently. The developed actuator is subjected to the experiment for the evaluation of various test surfaces; aluminum, brick, ceramic, concrete and glass. The driving high voltage is varied in steps to determine the characteristics of the output holding force. Results show a quadratic relation between F (adhesion force) and V (driving voltage) within the 2 kV range. After this range, the F-V responses consistently show a saturation trend at high electric fields. Next, the concept of the leakage current that can occur in the dielectric material and the corona discharge through air has been introduced. Results show that the voltage level, which corresponds to the beginning of the supply current, matches well with the beginning of the force saturation. With the confirmation of this hypothesis, a working model for electroadhesion actuation is proposed. Based on the experimental results, it is proposed that such a kind of actuator can be driven within a range of optimum high voltage to remain electrically efficient. This practice is recommended for the future design, development and characterization of electroadhesion actuators for robotic applications.
Keywords: corona discharge; dielectric actuation; electroadhesion actuator; electrostatic force; holding force; leakage current.
Conflict of interest statement
The authors declare no conflict of interest.
Figures










References
-
- Monkman G.J. An analysis of astrictive prehension. Int. J. Rob. Res. 1997;16:1–10. doi: 10.1177/027836499701600101. - DOI
-
- Chen X.Q., Sarhadi M. Investigation of electrostatic force for robotic lay-up of composite fabrics. Mechatronics. 1992;2:363–373. doi: 10.1016/0957-4158(92)90003-7. - DOI
-
- Monkman G.J. Robot grippers for use with fibrous materials. Int. J. Rob. Res. 1995;14:144–151. doi: 10.1177/027836499501400204. - DOI
-
- Zhang Z. Modeling and analysis of electrostatic force for robot handling of fabric materials. IEEE/ASME Trans. Mechatron. 1999;4:39–49. doi: 10.1109/3516.752083. - DOI
-
- Yatsuzuka K., Hatakeyama F., Asano K., Aonuma S. Fundamental characteristics of electrostatic wafer chuck with insulating sealant. IEEE Trans. Ind. Appl. 2000;36:510–516. doi: 10.1109/28.833768. - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
