

Neuroprosthetic-enabled control of graded arm muscle contraction in a paralyzed human
- PMID: 28827605
- PMCID: PMC5567199
- DOI: 10.1038/s41598-017-08120-9
Neuroprosthetic-enabled control of graded arm muscle contraction in a paralyzed human
Abstract
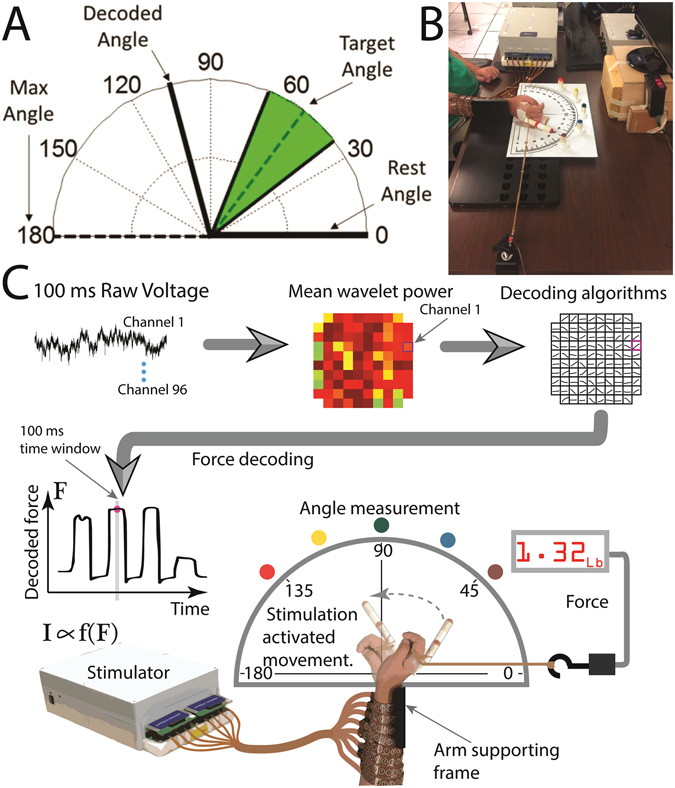
Neuroprosthetics that combine a brain computer interface (BCI) with functional electrical stimulation (FES) can restore voluntary control of a patients' own paralyzed limbs. To date, human studies have demonstrated an "all-or-none" type of control for a fixed number of pre-determined states, like hand-open and hand-closed. To be practical for everyday use, a BCI-FES system should enable smooth control of limb movements through a continuum of states and generate situationally appropriate, graded muscle contractions. Crucially, this functionality will allow users of BCI-FES neuroprosthetics to manipulate objects of different sizes and weights without dropping or crushing them. In this study, we present the first evidence that using a BCI-FES system, a human with tetraplegia can regain volitional, graded control of muscle contraction in his paralyzed limb. In addition, we show the critical ability of the system to generalize beyond training states and accurately generate wrist flexion states that are intermediate to training levels. These innovations provide the groundwork for enabling enhanced and more natural fine motor control of paralyzed limbs by BCI-FES neuroprosthetics.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures
References
-
- Kao JC, Stavisky SD, Sussillo D, Nuyujukian P, Shenoy KV. Information Systems Opportunities in Brain-Machine Interface Decoders. Proceedings of the Ieee. 2014;102:666. doi: 10.1109/JPROC.2014.2307357. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
Miscellaneous
