

A Nonlinear Dynamics-Based Estimator for Functional Electrical Stimulation: Preliminary Results From Lower-Leg Extension Experiments
- PMID: 28885155
- PMCID: PMC5793227
- DOI: 10.1109/TNSRE.2017.2748420
A Nonlinear Dynamics-Based Estimator for Functional Electrical Stimulation: Preliminary Results From Lower-Leg Extension Experiments
Abstract
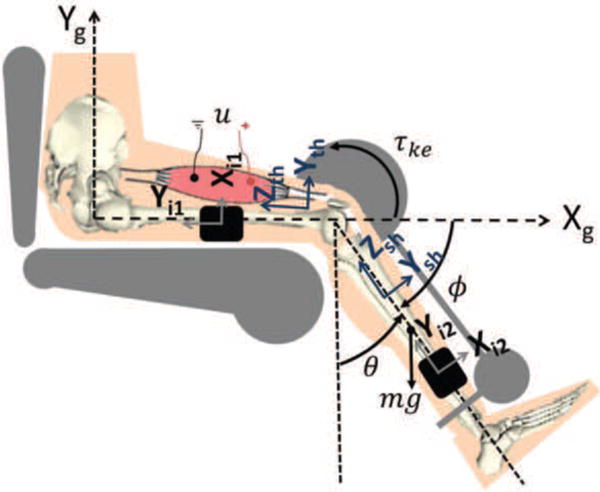
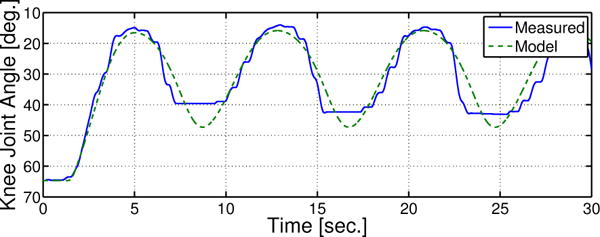
Miniature inertial measurement units (IMUs) are wearable sensors that measure limb segment or joint angles during dynamic movements. However, IMUs are generally prone to drift, external magnetic interference, and measurement noise. This paper presents a new class of nonlinear state estimation technique called state-dependent coefficient (SDC) estimation to accurately predict joint angles from IMU measurements. The SDC estimation method uses limb dynamics, instead of limb kinematics, to estimate the limb state. Importantly, the nonlinear limb dynamic model is formulated into state-dependent matrices that facilitate the estimator design without performing a Jacobian linearization. The estimation method is experimentally demonstrated to predict knee joint angle measurements during functional electrical stimulation of the quadriceps muscle. The nonlinear knee musculoskeletal model was identified through a series of experiments. The SDC estimator was then compared with an extended kalman filter (EKF), which uses a Jacobian linearization and a rotation matrix method, which uses a kinematic model instead of the dynamic model. Each estimator's performance was evaluated against the true value of the joint angle, which was measured through a rotary encoder. The experimental results showed that the SDC estimator, the rotation matrix method, and EKF had root mean square errors of 2.70°, 2.86°, and 4.42°, respectively. Our preliminary experimental results show the new estimator's advantage over the EKF method but a slight advantage over the rotation matrix method. However, the information from the dynamic model allows the SDC method to use only one IMU to measure the knee angle compared with the rotation matrix method that uses two IMUs to estimate the angle.
Figures







References
-
- Giuffrida JP, Crago PE. Functional restoration of elbow extension after spinal-cord injury using a neural network-based synergistic FES controller. IEEE Trans Neural Syst Rehabil Eng. 2005;13(2):147–152. - PubMed
-
- Popovic M, Popovic D, Keller T. Neuroprostheses for grasping. Neurological Research. 2002;24(5):443–452. - PubMed
-
- Bajd T, Kralj A, Turk R, Benko H, Šega J. The use of a four-channel electrical stimulator as an ambulatory aid for paraplegic patients. Phys Ther. 1983;63:1116–1120. - PubMed
-
- Stein RB, Everaert DG, Thompson AK, Chong SL, Whittaker M, Robertson J, Kuether G. Long-term therapeutic and orthotic effects of a foot drop stimulator on walking performance in progressive and nonprogressive neurological disorders. Neurorehab Neural Re. 2010 Feb;24(2):152–67. [Online]. Available: http://nnr.sagepub.com/content/24/2/152. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
