

Stability of hand force production. I. Hand level control variables and multifinger synergies
- PMID: 28904102
- PMCID: PMC5814709
- DOI: 10.1152/jn.00485.2017
Stability of hand force production. I. Hand level control variables and multifinger synergies
Abstract
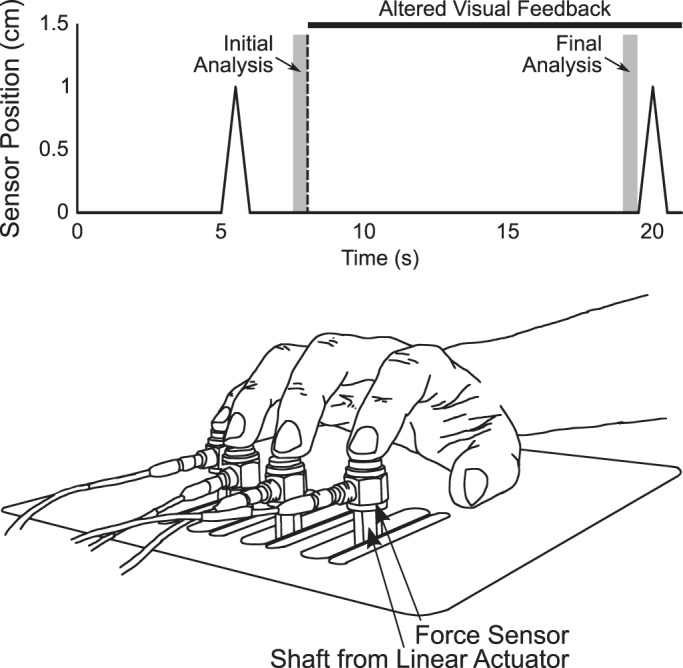
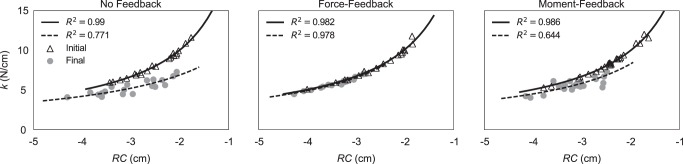
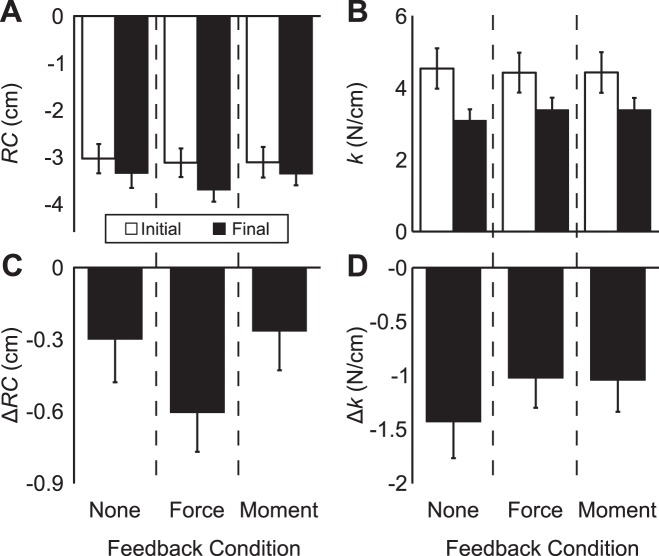
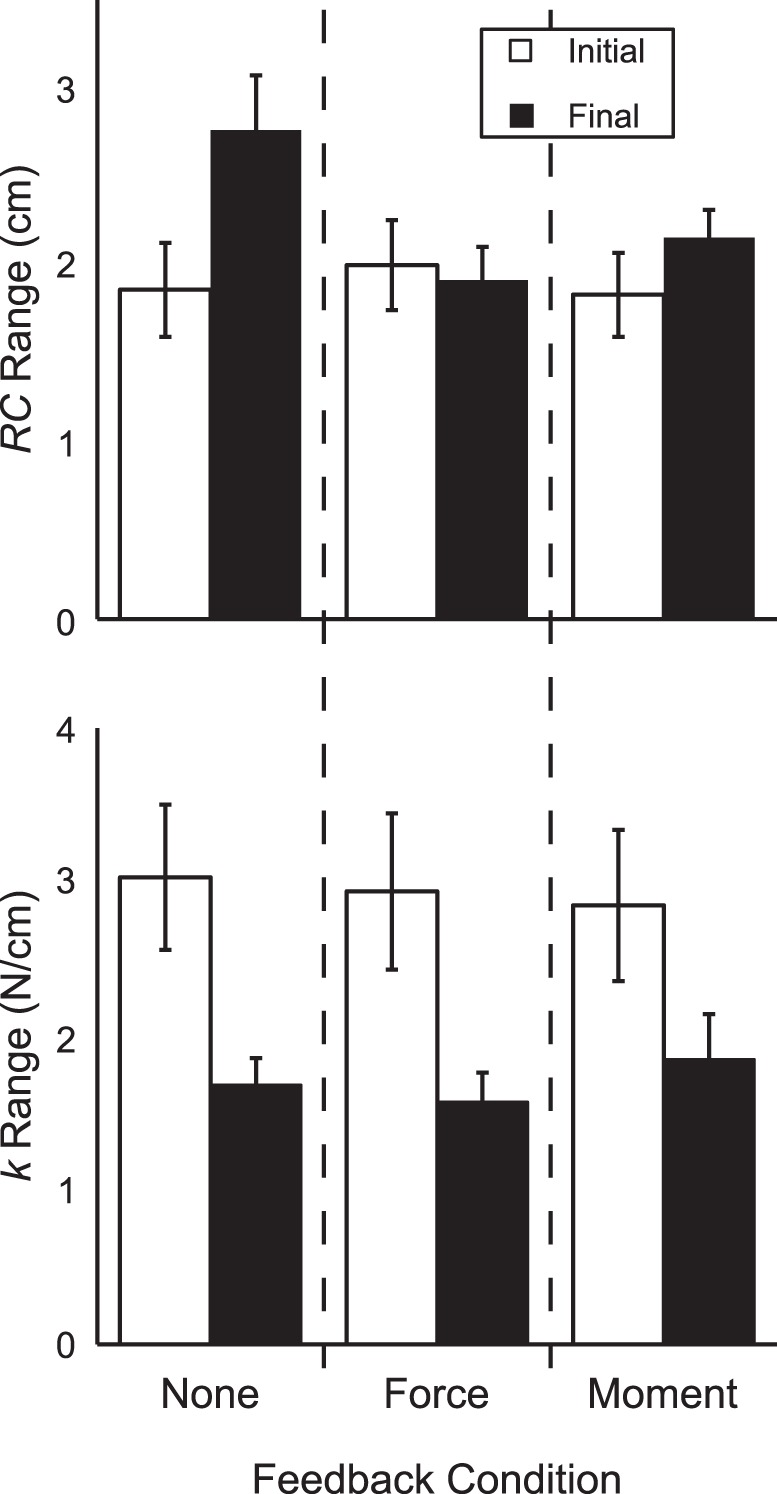
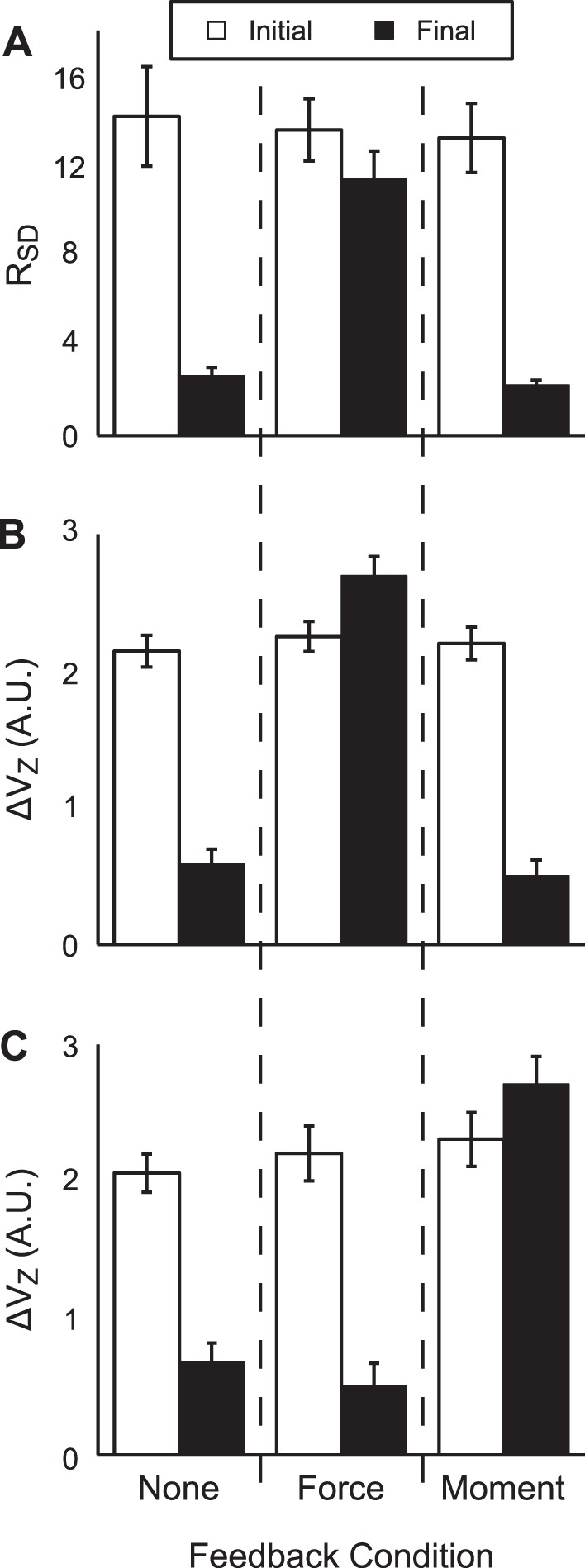
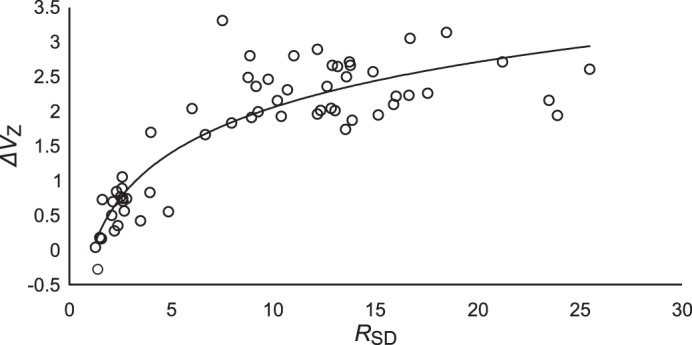
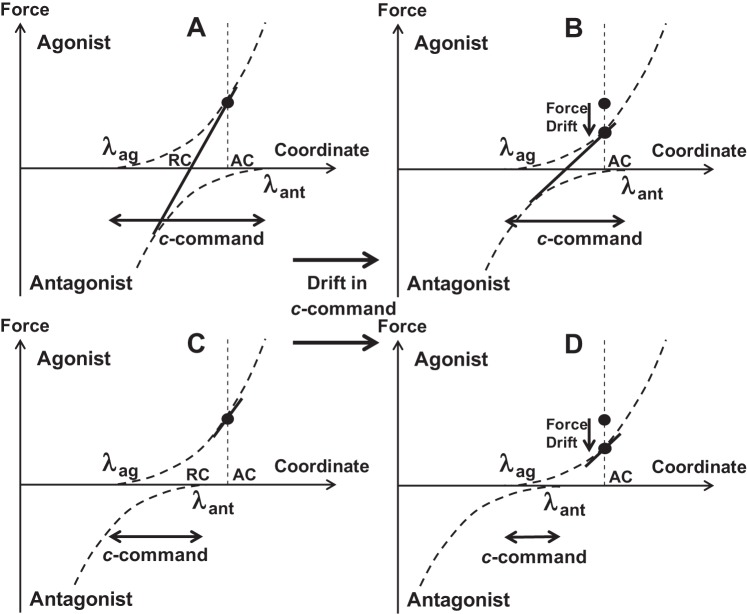
We combined the theory of neural control of movement with referent coordinates and the uncontrolled manifold hypothesis to explore synergies stabilizing the hand action in accurate four-finger pressing tasks. In particular, we tested a hypothesis on two classes of synergies, those among the four fingers and those within a pair of control variables, stabilizing hand action under visual feedback and disappearing without visual feedback. Subjects performed four-finger total force and moment production tasks under visual feedback; the feedback was later partially or completely removed. The "inverse piano" device was used to lift and lower the fingers smoothly at the beginning and at the end of each trial. These data were used to compute pairs of hypothetical control variables. Intertrial analysis of variance within the finger force space was used to quantify multifinger synergies stabilizing both force and moment. A data permutation method was used to quantify synergies among control variables. Under visual feedback, synergies in the spaces of finger forces and hypothetical control variables were found to stabilize total force. Without visual feedback, the subjects showed a force drift to lower magnitudes and a moment drift toward pronation. This was accompanied by disappearance of the four-finger synergies and strong attenuation of the control variable synergies. The indexes of the two types of synergies correlated with each other. The findings are interpreted within the scheme with multiple levels of abundant variables.NEW & NOTEWORTHY We extended the idea of hierarchical control with referent spatial coordinates for the effectors and explored two types of synergies stabilizing multifinger force production tasks. We observed synergies among finger forces and synergies between hypothetical control variables that stabilized performance under visual feedback but failed to stabilize it after visual feedback had been removed. Indexes of two types of synergies correlated with each other. The data suggest the existence of multiple mechanisms stabilizing motor actions.
Keywords: multifinger coordination; referent coordination; synergy; uncontrolled manifold hypothesis.
Copyright © 2017 the American Physiological Society.
Figures

Similar articles
-
Stability of hand force production. II. Ascending and descending synergies.J Neurophysiol. 2018 Sep 1;120(3):1045-1060. doi: 10.1152/jn.00045.2018. Epub 2018 Jun 6. J Neurophysiol. 2018. PMID: 29873618 Free PMC article.
-
On the nature of unintentional action: a study of force/moment drifts during multifinger tasks.J Neurophysiol. 2016 Aug 1;116(2):698-708. doi: 10.1152/jn.00180.2016. Epub 2016 May 18. J Neurophysiol. 2016. PMID: 27193319 Free PMC article.
-
Two classes of action-stabilizing synergies reflecting spinal and supraspinal circuitry.J Neurophysiol. 2024 Feb 1;131(2):152-165. doi: 10.1152/jn.00352.2023. Epub 2023 Dec 20. J Neurophysiol. 2024. PMID: 38116603
-
Multi-finger prehension: control of a redundant mechanical system.Adv Exp Med Biol. 2009;629:597-618. doi: 10.1007/978-0-387-77064-2_32. Adv Exp Med Biol. 2009. PMID: 19227523 Review.
-
The Nature of Finger Enslaving: New Results and Their Implications.Motor Control. 2021 Sep 16;25(4):680-703. doi: 10.1123/mc.2021-0044. Motor Control. 2021. PMID: 34530403 Review.
Cited by
-
Reciprocal and coactivation commands at the level of individual motor units in an extrinsic finger flexor-extensor muscle pair.Exp Brain Res. 2022 Jan;240(1):321-340. doi: 10.1007/s00221-021-06255-w. Epub 2021 Nov 2. Exp Brain Res. 2022. PMID: 34725732
-
Synergies at the level of motor units in single-finger and multi-finger tasks.Exp Brain Res. 2021 Sep;239(9):2905-2923. doi: 10.1007/s00221-021-06180-y. Epub 2021 Jul 26. Exp Brain Res. 2021. PMID: 34312703
-
Unintentional force drifts in the lower extremities.Exp Brain Res. 2023 May;241(5):1309-1318. doi: 10.1007/s00221-023-06608-7. Epub 2023 Mar 31. Exp Brain Res. 2023. PMID: 37000201
-
Force drifts and matching errors in the lower extremities: implications for the control and perception of foot force.Exp Brain Res. 2024 Dec 31;243(1):37. doi: 10.1007/s00221-024-06990-w. Exp Brain Res. 2024. PMID: 39739043
-
Beyond rambling and trembling: effects of visual feedback on slow postural drift.Exp Brain Res. 2019 Mar;237(3):865-871. doi: 10.1007/s00221-019-05470-w. Epub 2019 Jan 11. Exp Brain Res. 2019. PMID: 30635703 Free PMC article.
References
-
- Bernstein NA. The problem of interrelation between coordination and localization [in Russian] Arch Biol Sci 38: 1–35, 1935.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources